一、 汇编里指定指令集
对于IMX6ULL、STM32MP157,默认使用ARM指令集。 在汇编文件里,可以使用这样的语法告诉编译器所使用的指令集:
1.1 新语法
.arm // 表示后续的指令使用ARM指令集
.thumb // 表示后续的指令使用thumb指令集
1.2 以前的语法
.code 32 // 表示后续的指令使用ARM指令集
.code 16 // 表示后续的指令使用thumb指令集
二、编译C文件时指定指令集
使用GCC编译时:
-marm // 使用ARM指令集编译
-mthumb // 使用Thumb指令集编译
//比如:
arm-linux-gcc -marm -c -o main.o main.c
2.1 举例
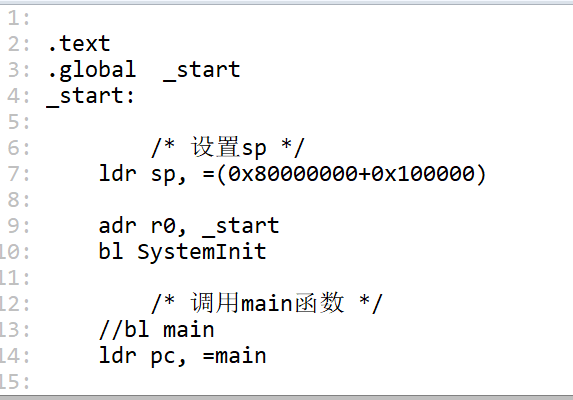
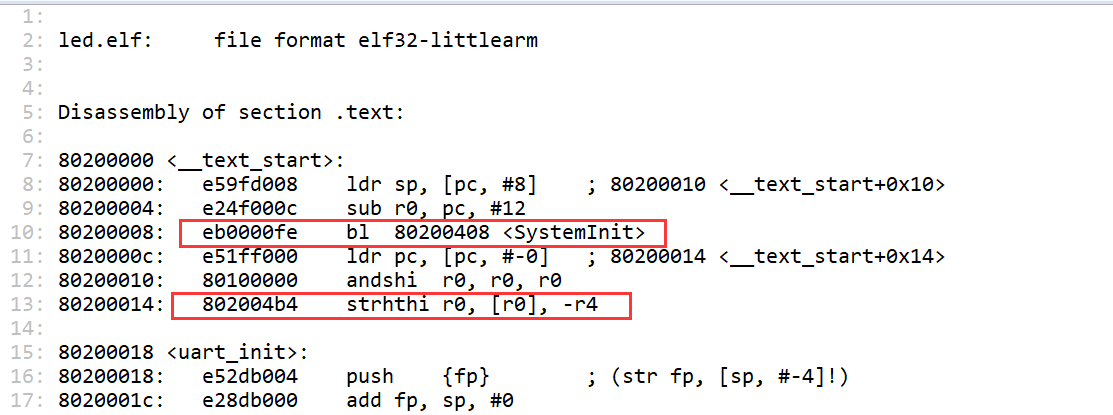
我们不添加该编译选项编译一个以前的文件,原先的Strat.S
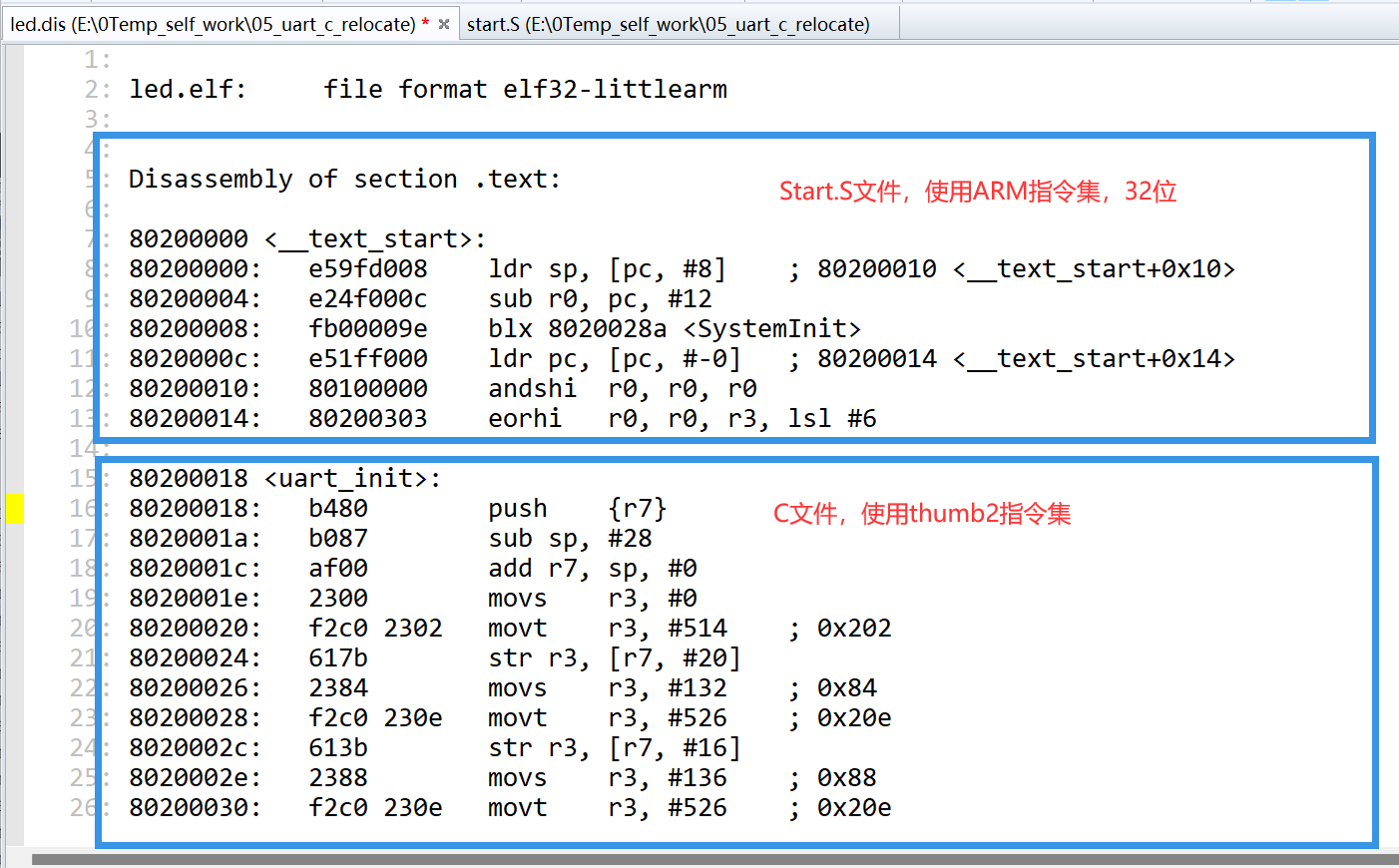
然后打开生成的dis反汇编文件
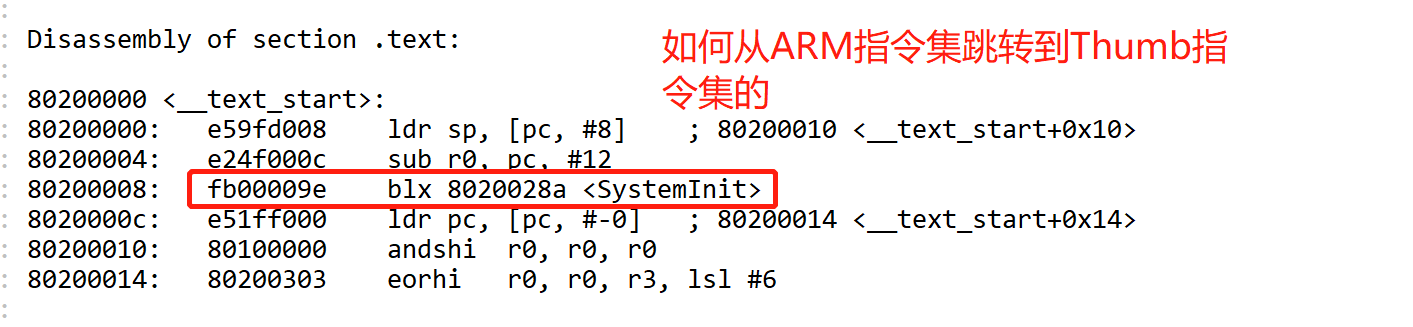
查看该命令的机器码,转换为二进制为
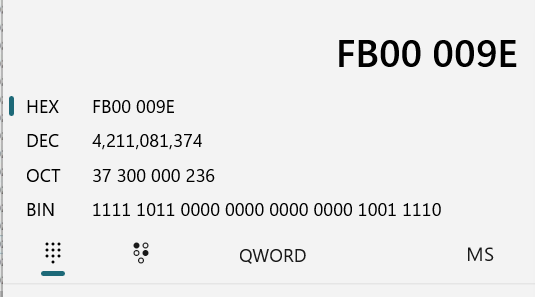
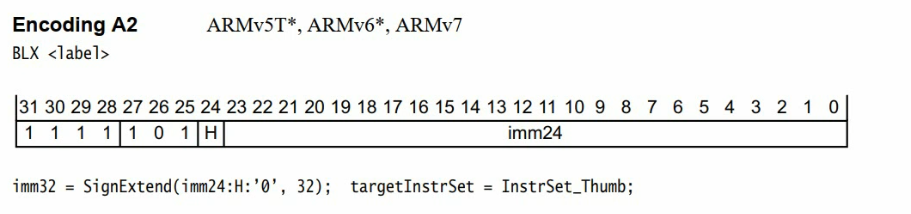
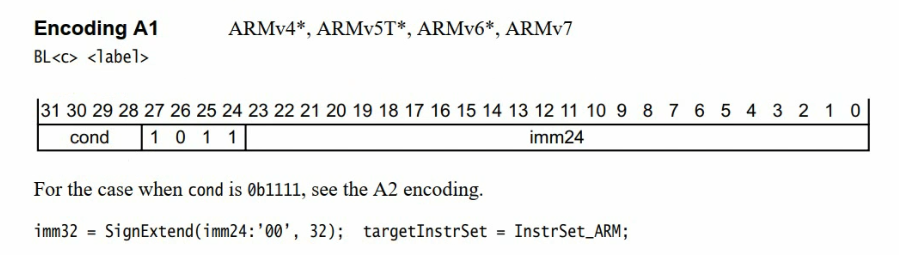
对照资料“ARM ArchitectureReference Manual ARMv7-A and ARMv7-R edition.pdf"找到其所使用的指令,其中目标指令集是thumb指令集
2.2 修改Makefile编译选项
修改makefile的编译选项
添加-marm选项指定编译指令集
得到新的dis文件
2.3 对照举例
对照机器码,得知跳过去执行的函数是ARM指令集
2.4 结论
无论C函数使用什么指令集,汇编指令都可以保持不变
编译器会帮我们使用合适的机器码
三、汇编里面切换CPU状态
要切换CPU的State,比如从ARM切换到Thumb,或者从Thumb切换到ARM,可以使用BX、BLX指令:
// 如果R0的bit0为0,表示切换到ARM State; 如果R0的bit0位1,表示切换到Thumb State
BX R0
BLX R0
汇编里调用C函数时,可以直接如此调用:
LDR PC, =main // 如果main函数时用Thumb指令集编译的,最终的指令如下:
// 注意到下面的c020051b,它的bit0为1
c0200010: e59ff004 ldr pc, [pc, #4] ; c020001c <AB+0x14>
c0200014: c0100000 andsgt r0, r0, r0
c0200018: c02004a3 eorgt r0, r0, r3, lsr #9
c020001c: c020051b eorgt r0, r0, fp, lsl r5