StudyNotes
LCD
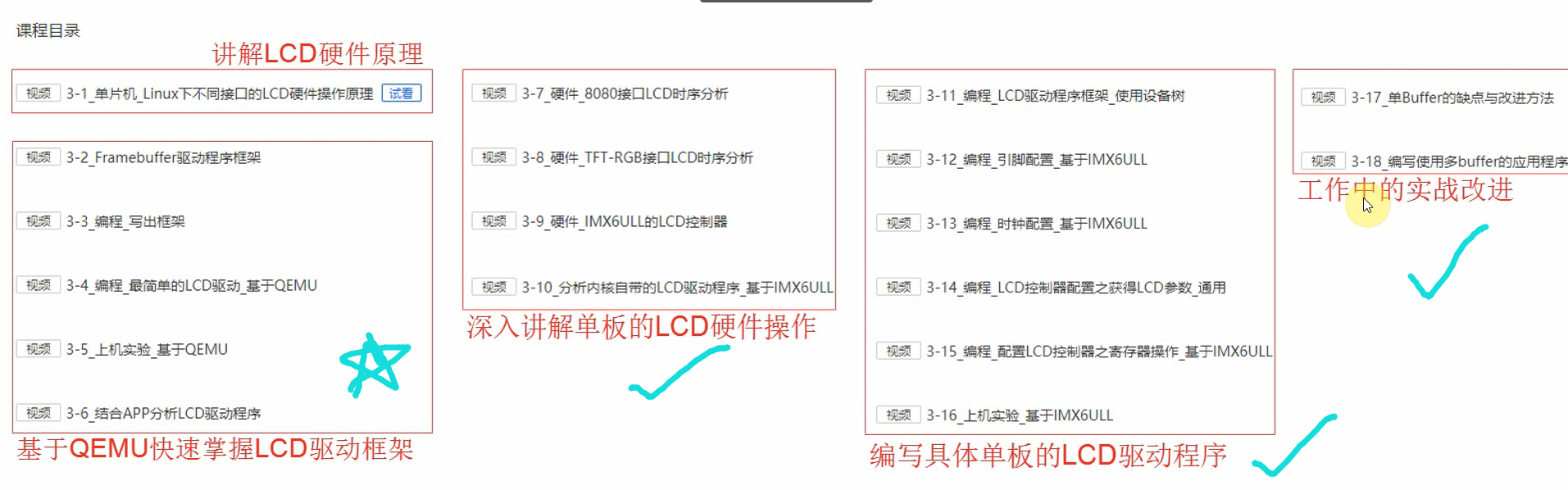
1 framebuffer框架
总的来说:
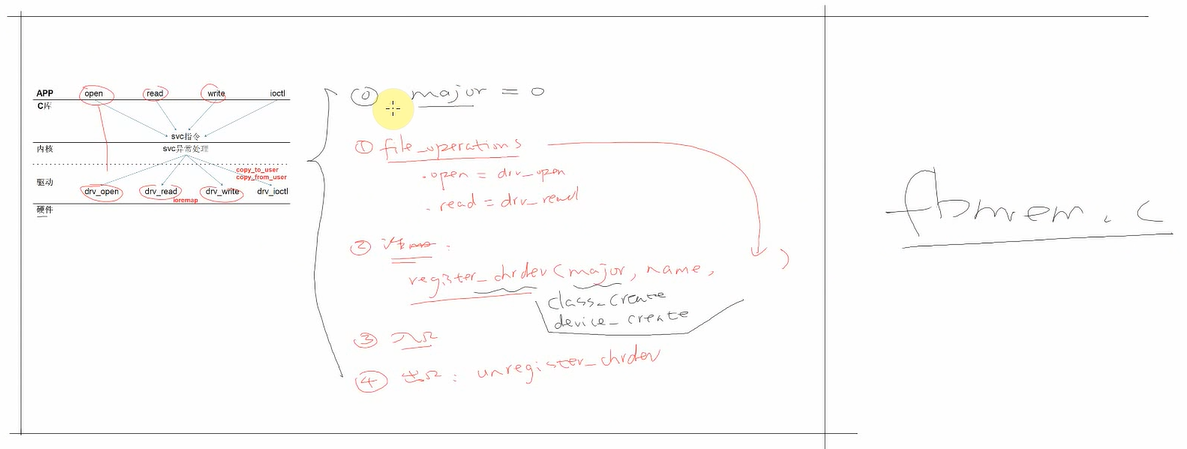
- 内核中已经编写了一个驱动框架 fbmem.c,里面已经有设备驱动框架那一套了,有read,write,open这些函数
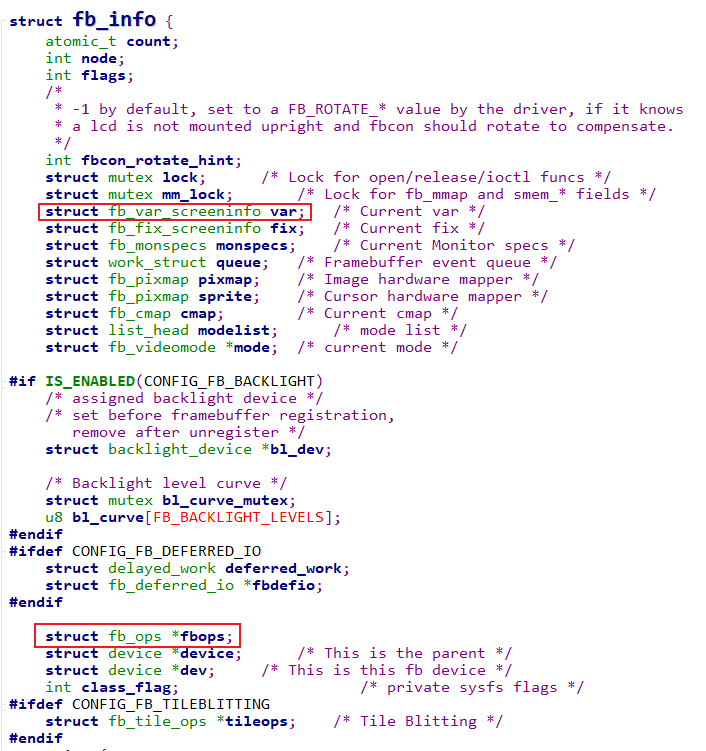
- 这个 fbmem.c可以适配到很多不同的单板和lcd,所以这些单板和lcd的信息,又抽象出了一个共同描述硬件信息的结构体,就是 fb_info 结构体,
分为上下两层:
-
fbmem.c:承上启下(只是起到中转的作用,最终还是调用到 具体单板的 read,write 函数)
- 实现、注册file_operations结构体
- 把APP的调用向下转发到具体的硬件驱动程序
在内核里面,已经有一个fbmem.c,帮我们实现了这个0~4个字符设备驱动的框架。
 对于不同的硬件,不同的LCD,都会有不同的 fb_info 结构体。
对于不同的硬件,不同的LCD,都会有不同的 fb_info 结构体。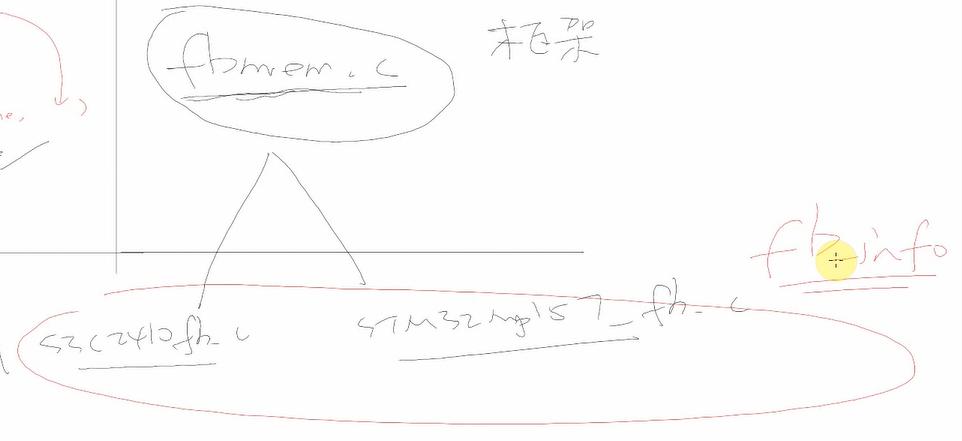
-
xxx_fb.c:硬件相关的驱动程序
- 实现、注册fb_info结构体
- 实现硬件操作
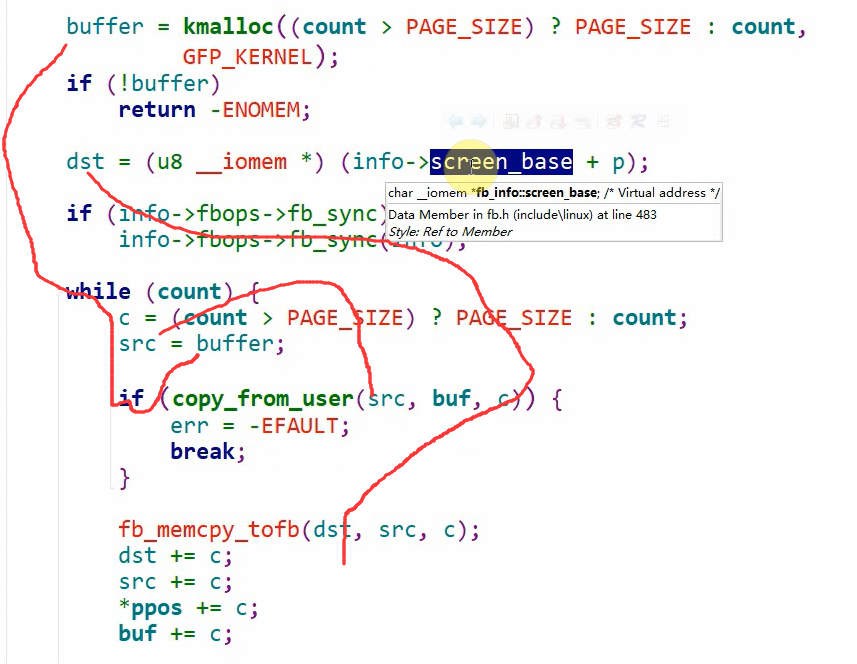
fb_info结构体是和硬件相关,驱动程序的那些 read,write,open函数,最先都先获取到这个 fb_info结构体,然后取出里面的LCD硬件和时序相关的信息。
info->screen_base就是显存的基地址,p是offset,

先把用户空间的数据buf拷贝到src也就是动态申请的内存 buffer中,然后再把 buffer的数据拷贝到显存的基地址中
调用关系:
例子1:
app: open("/dev/fb0", ...) 主设备号: 29, 次设备号: 0
--------------------------------------------------------------
kernel:
fb_open
int fbidx = iminor(inode);
struct fb_info *info = = registered_fb[0];
例子2:
app: read()
---------------------------------------------------------------
kernel:
fb_read
int fbidx = iminor(inode);
struct fb_info *info = registered_fb[fbidx];
if (info->fbops->fb_read)
return info->fbops->fb_read(info, buf, count, ppos);
src = (u32 __iomem *) (info->screen_base + p);
dst = buffer;
*dst++ = fb_readl(src++);
copy_to_user(buf, buffer, c)
1.1 怎么编写Framebuffer驱动程序
核心:分配、设置、注册 fb_info结构体
-
分配fb_info
- framebuffer_alloc
-
设置fb_info
- var
- fbops
- 硬件相关操作
-
注册fb_info
- register_framebuffer
2 从驱动工程师和应用工程师的角度看LCD
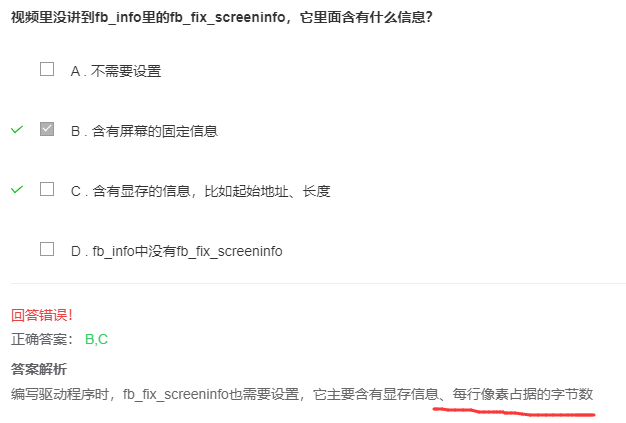
对于应用工程师,只需要知道下面的三点,就可以对LCD进行操作了
(1)framebuffer的基地址(也就是指针)
(2)使用多少位数据来表示一个像素点
(3)知道LCD屏幕的尺寸,从而可以找到像素点所对应的framebuffer的位置
对于驱动工程师,需要知道更多
(1)需要知道framebuffer存在哪里?在控制器的里面,还是在LCD上就有GRAM
(2)谁把framebuffer的数据刷新到LCD上,需要有LCD控制器,而驱动工程师就是要完成这个LCD控制器的初始化工作
3 不同接口的LCD引脚
3.1 157的引脚
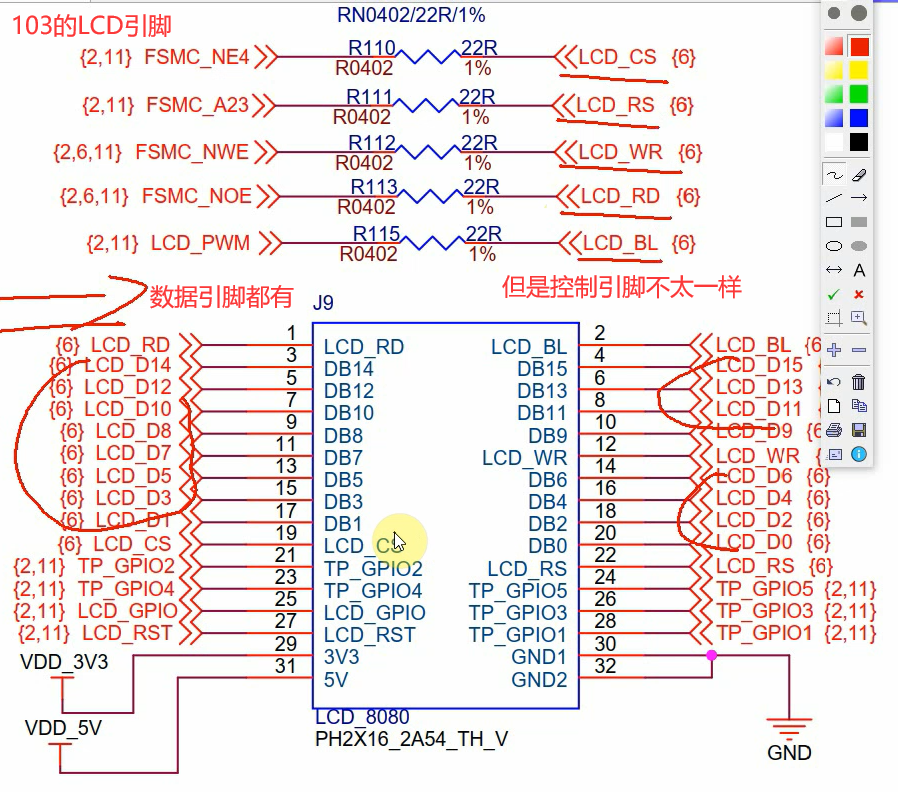
3.2 103的引脚
4 pinctrl子系统
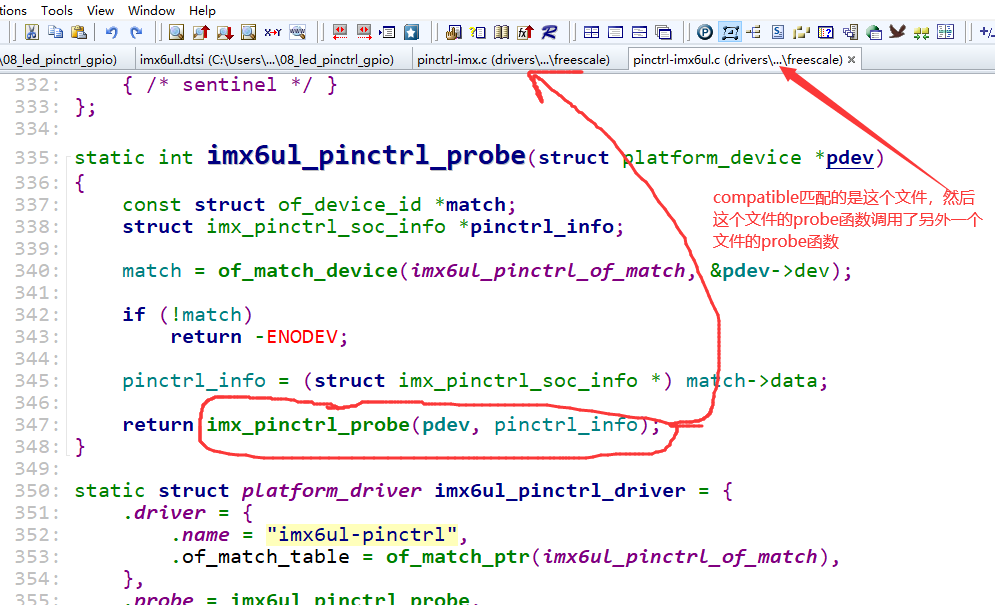
4.1 分析 pinctrl 子系统的实现原理
根节点下的这个 iomuxc ,里面有 compatible 属性,所以必定会转换成一个平台设备,所以 pinctrl 在内核中的实现,必定会有一个对应的驱动。直接查看 pinctrl-imx.c 驱动文件中的 probe 函数

找到 pinctrl 的驱动文件。
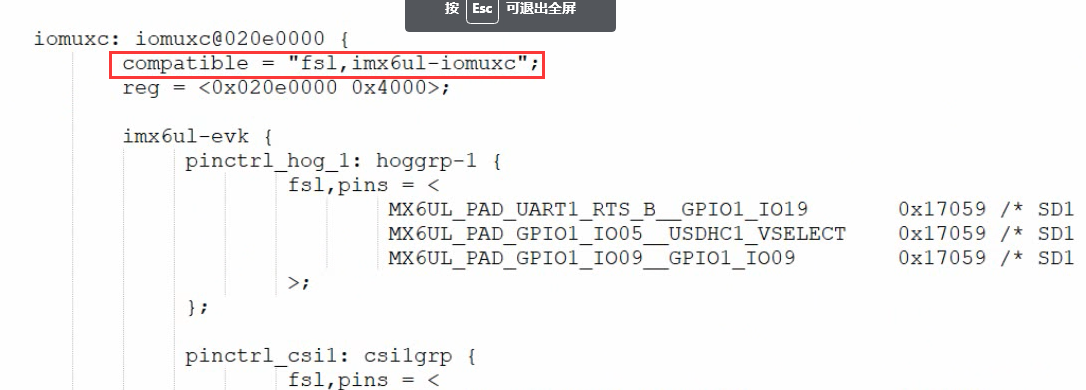
设备树信息
iomuxc: iomuxc@020e0000 {
compatible = "fsl,imx6ul-iomuxc";
reg = <0x020e0000 0x4000>;
};
源码分析
int imx_pinctrl_probe(struct platform_device *pdev,
struct imx_pinctrl_soc_info *info)
{
struct regmap_config config = { .name = "gpr" };
// 从平台设备结构体中获得设备树结构体device_node,然后可以调用 of函数调用里面的属性值
struct device_node *dev_np = pdev->dev.of_node;
// pinctrl描述符结构体,非常重要
struct pinctrl_desc *imx_pinctrl_desc;
struct device_node *np;
struct imx_pinctrl *ipctl;
struct resource *res; // 下面肯定要获取设备树的资源信息
struct regmap *gpr;
int ret, i;
if (!info || !info->pins || !info->npins) {
dev_err(&pdev->dev, "wrong pinctrl info\n");
return -EINVAL;
}
info->dev = &pdev->dev;
if (info->gpr_compatible) {
gpr = syscon_regmap_lookup_by_compatible(info->gpr_compatible);
if (!IS_ERR(gpr))
regmap_attach_dev(&pdev->dev, gpr, &config);
}
/* Create state holders etc for this driver */
ipctl = devm_kzalloc(&pdev->dev, sizeof(*ipctl), GFP_KERNEL);
if (!ipctl)
return -ENOMEM;
if (!(info->flags & IMX8_USE_SCU)) {
info->pin_regs = devm_kmalloc(&pdev->dev, sizeof(*info->pin_regs) *
info->npins, GFP_KERNEL);
if (!info->pin_regs)
return -ENOMEM;
for (i = 0; i < info->npins; i++) {
info->pin_regs[i].mux_reg = -1;
info->pin_regs[i].conf_reg = -1;
}
// 获取 platform_device 平台设备中的存储类信息,其实就是 reg = <0x020e0000 0x4000>;
// 获取其中的第一个资源
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
// 检查一个资源是否是一个有效的内存区域,请求内存区域并对其进行ioremap。
// 所有的操作都是管理的,并将在驱动器分离时撤消。
// 这里得到了设备映射后的虚拟基地址
ipctl->base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(ipctl->base))
return PTR_ERR(ipctl->base);
if (of_property_read_bool(dev_np, "fsl,input-sel")) {
np = of_parse_phandle(dev_np, "fsl,input-sel", 0);
if (!np) {
dev_err(&pdev->dev, "iomuxc fsl,input-sel property not found\n");
return -EINVAL;
}
ipctl->input_sel_base = of_iomap(np, 0);
of_node_put(np);
if (!ipctl->input_sel_base) {
dev_err(&pdev->dev,
"iomuxc input select base address not found\n");
return -ENOMEM;
}
}
}
// 申请一个描述符空间
imx_pinctrl_desc = devm_kzalloc(&pdev->dev, sizeof(*imx_pinctrl_desc),
GFP_KERNEL);
if (!imx_pinctrl_desc)
return -ENOMEM;
// 设置里面的值
imx_pinctrl_desc->name = dev_name(&pdev->dev);
imx_pinctrl_desc->pins = info->pins;
imx_pinctrl_desc->npins = info->npins;
imx_pinctrl_desc->pctlops = &imx_pctrl_ops;
imx_pinctrl_desc->pmxops = &imx_pmx_ops;
imx_pinctrl_desc->confops = &imx_pinconf_ops;
imx_pinctrl_desc->owner = THIS_MODULE;
ret = imx_pinctrl_probe_dt(pdev, info);
if (ret) {
dev_err(&pdev->dev, "fail to probe dt properties\n");
return ret;
}
ipctl->info = info;
ipctl->dev = info->dev;
platform_set_drvdata(pdev, ipctl);
// 注册描述符
ipctl->pctl = devm_pinctrl_register(&pdev->dev,
imx_pinctrl_desc, ipctl);
if (IS_ERR(ipctl->pctl)) {
dev_err(&pdev->dev, "could not register IMX pinctrl driver\n");
return PTR_ERR(ipctl->pctl);
}
dev_info(&pdev->dev, "initialized IMX pinctrl driver\n");
return 0;
}
platform_device
device
of_node

5 LCD自定义驱动实现流程
5.1 例程流程
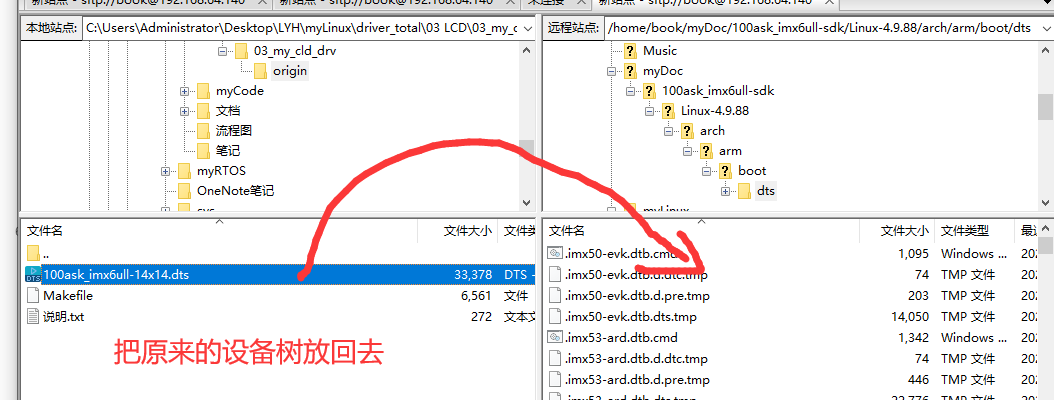
(1)需要更换设备树
- 把原来的设备树复制到目录
C:\Users\Administrator\Desktop\LYH\myLinux\driver_total\03 LCD\03_my_cld_drv\origin中了。 - 把例程的设备树
C:\Users\Administrator\Desktop\imx6ull\02_driver_total\doc_and_source_for_drivers\IMX6ULL\source\03_LCD\11_lcd_drv_imx6ull_ok添加到内核对应目录中/home/book/myDoc/100ask_imx6ull-sdk/Linux-4.9.88/arch/arm/boot/dts。
(2)需要修改 makefile,屏蔽内核的LCD驱动,添加自定义的LCD驱动
- 需要修改的是LCD驱动程序目录中的子makefile,如下图,mxsfb.c这个LCD驱动文件就在下面的文件夹中
/home/book/myDoc/100ask_imx6ull-sdk/Linux-4.9.88/drivers/video/fbdev - 需要修改的是这个文件夹中的makefile

- 打开 Makefile进行修改

(3)需要把LCD驱动源程序添加到某个文件夹中


(4)重新编译内核zImage,重新编译设备树dtb
-
根据完全开发手册编译内核 zImage 的流程进行编译
book@100ask:~/100ask_imx6ull-sdk$ cd Linux-4.9.88 book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make mrproper book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make 100ask_imx6ull_defconfig book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make zImage -j4 book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make dtbs book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ cp arch/arm/boot/zImage ~/nfs_rootfs book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs -
编译设备树
book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make dtbs
(5)上机实验,出现小企鹅和开机之后的logo,说明成功了
- 编译完成
zImage和dtb之后,可以拷贝这两个东西到开发板的/boot目录下,然后重启开发板,查看是否有企鹅出现 - 测试成功,直接可以运行QT的界面
5.2 编写自己的LCD驱动程序流程
5.2.1 修改设备树配置引脚
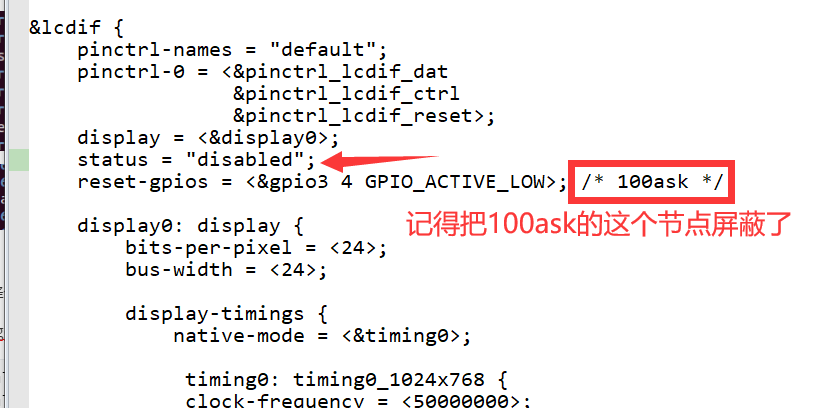
- 注释掉系统自带的 LCD 部分
- 然后需要添加 LCD 必备的参数信息
- 注意引脚有没有别的节点也使用了
- pin GUI 的使用
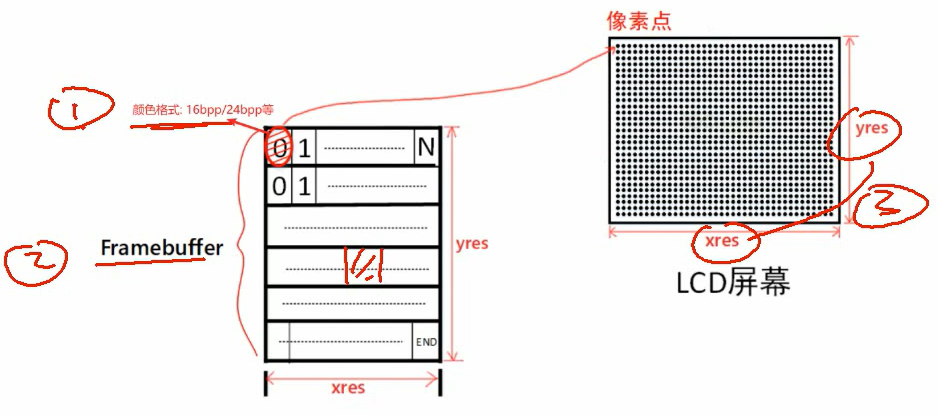
(1)查看原理图,看LCD屏幕的哪些引脚接到了imx6ull芯片的哪些pin角上面。
-
如下图所示,
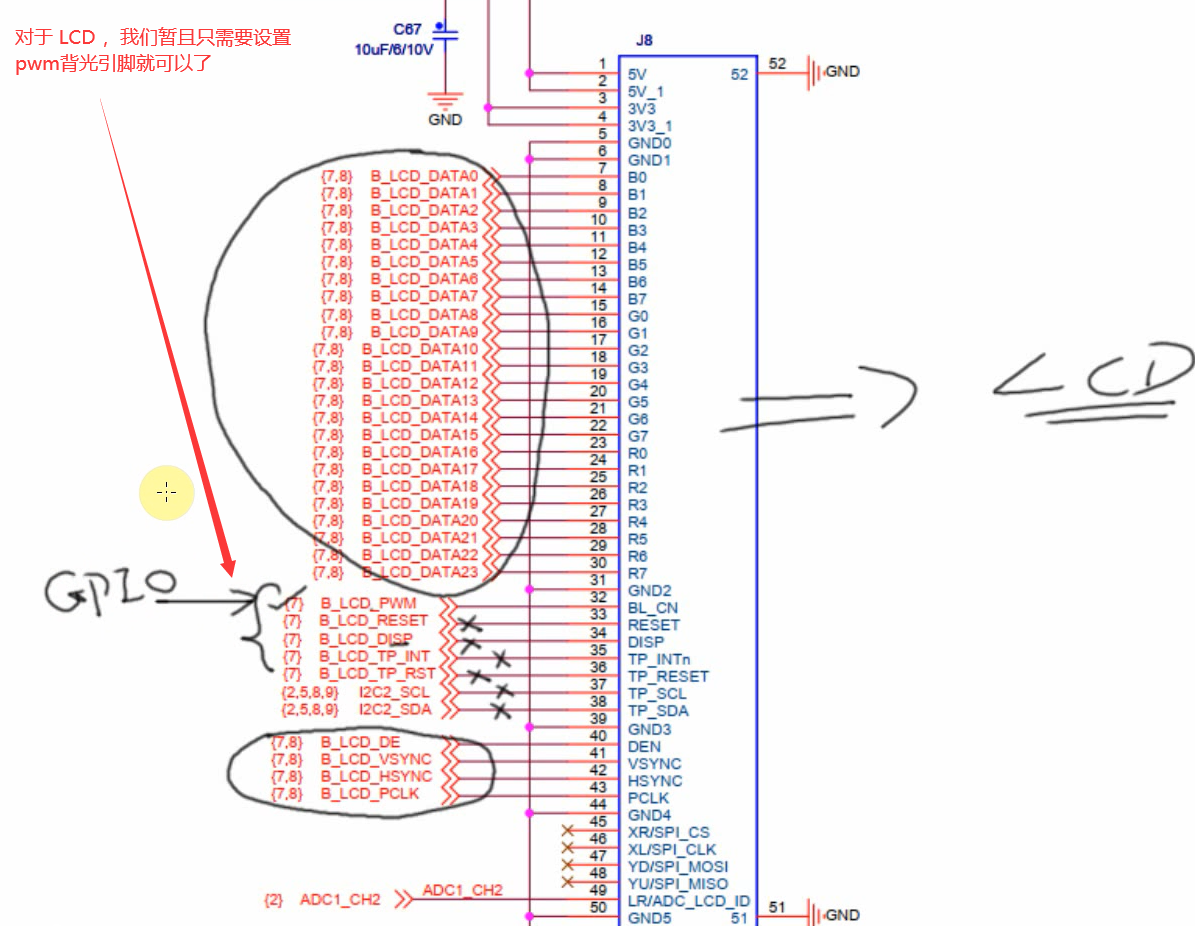
B0~B7、G0~G7、R0~R7这就是RGB888接口的LCD屏幕,在后面设置参数的时候需要使用到。 -
framebuffer那边选择的可能是 RGB565的数据格式,LCD屏幕是 RGB888的数据格式,所以LCD控制器内部需要实现把 RGB565的数据格式转换为RGB888的数据格式。
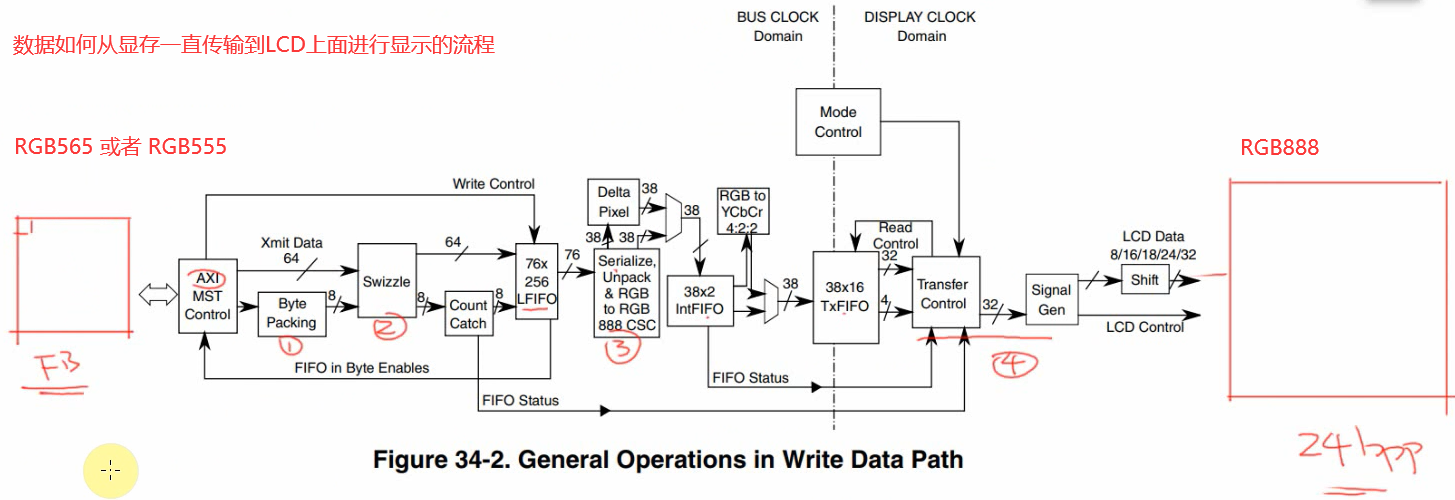
-
通过imx6ull和LCD的原理图,可以知道其使用到的引脚为 RGB888和下面的4个引脚和一个PWM引脚。
-
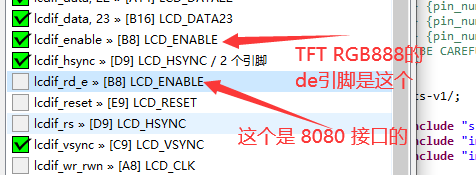
可以在pin的GUI设计软件中进行配置。
-
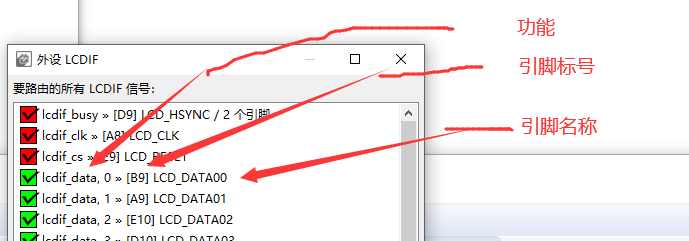
选择外设信号,LCDIF控制器,路由所有,会出现有冲突的引脚,然后选择去除掉没有使用的引脚,解决冲突问题
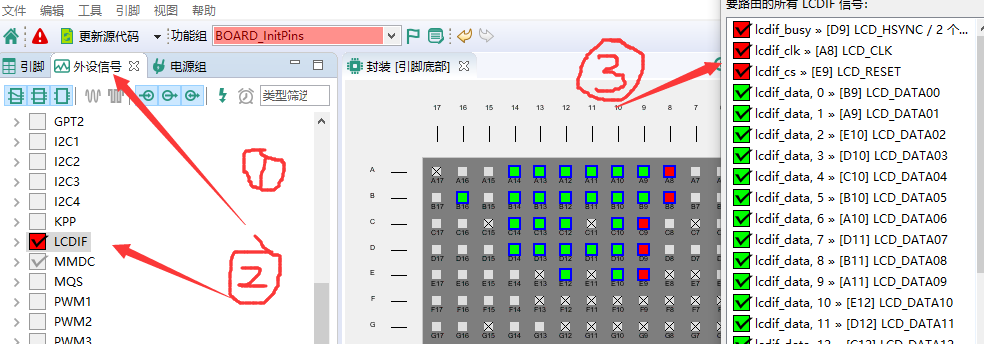
- 解释
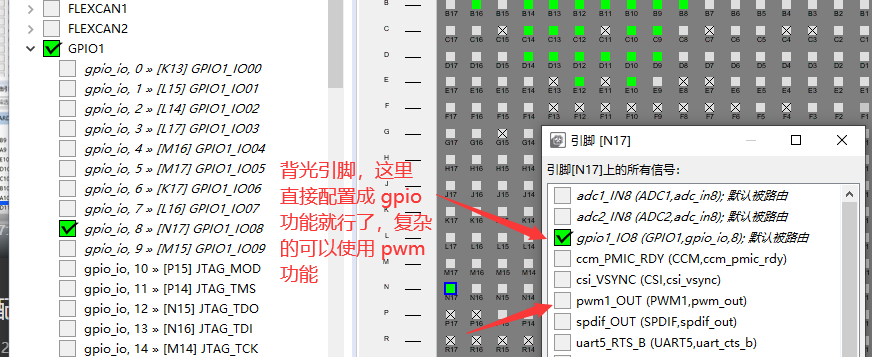
- LCD屏幕的引脚功能如下所示,注意 BL_CN是背光引脚
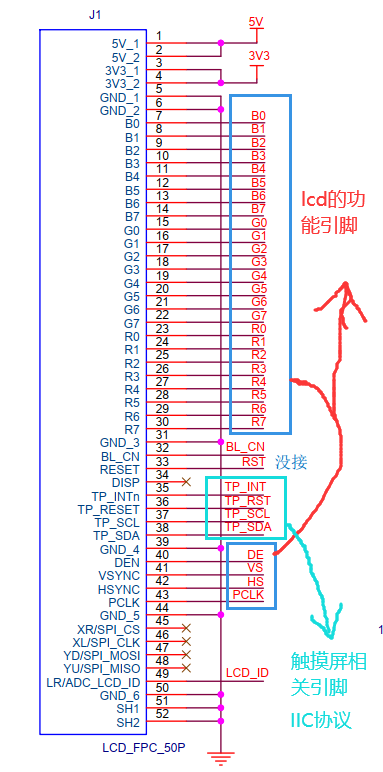
- 因为背光引脚不是LCD的功能引脚,可以使用任意一个GPIO引脚或者有PWM的功能引脚上,就可以了
- 在
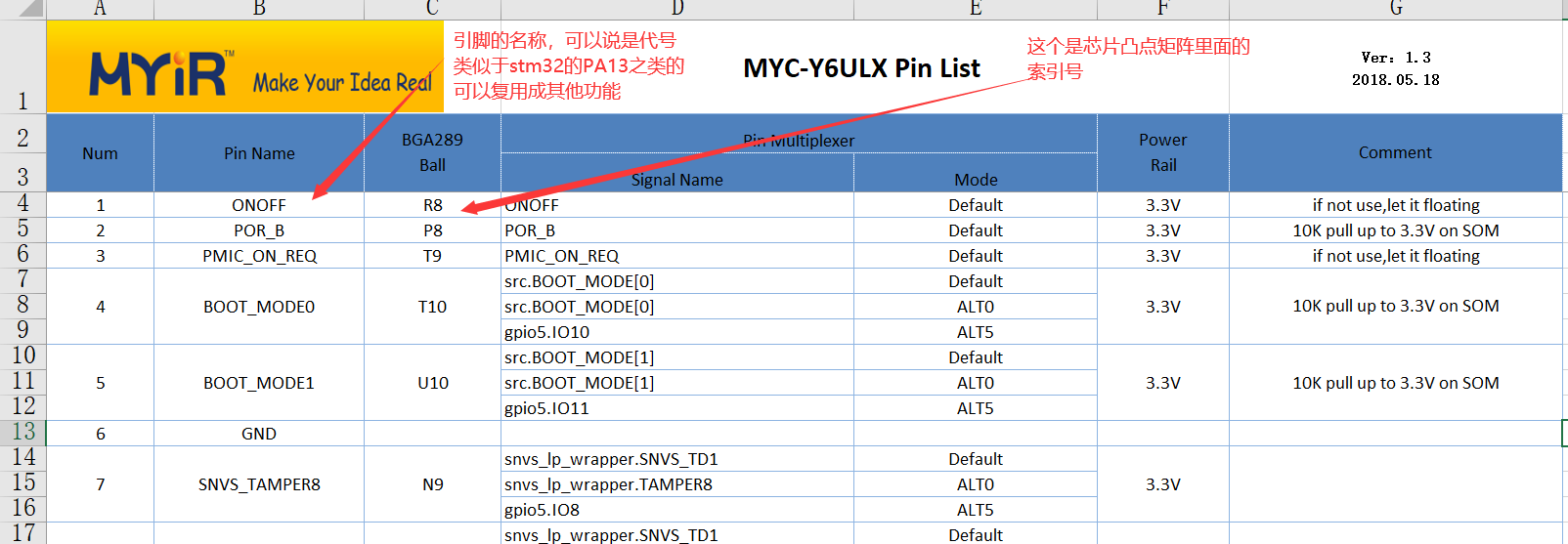
C:\Users\Administrator\Desktop\imx6ull\02_driver_total\doc_and_source_for_drivers\IMX6ULL\开发板配套资料\原理图\Base_board目录中的原理图上搜索这个引脚,就可以一直找到其 GPIO 的符号。

-
有些引脚找不到,可以在下面这个路径中查看这个 excel,这里我直接在原理图就找全了
-
C:\Users\Administrator\Desktop\imx6ull\02_driver_total\doc_and_source_for_drivers\IMX6ULL\开发板配套资料\原理图\Core_board
- 注意de引脚
- 背光引脚
- 设置完成之后,记得要更新源代码

- 修改设备树1:添加 pinctrl信息
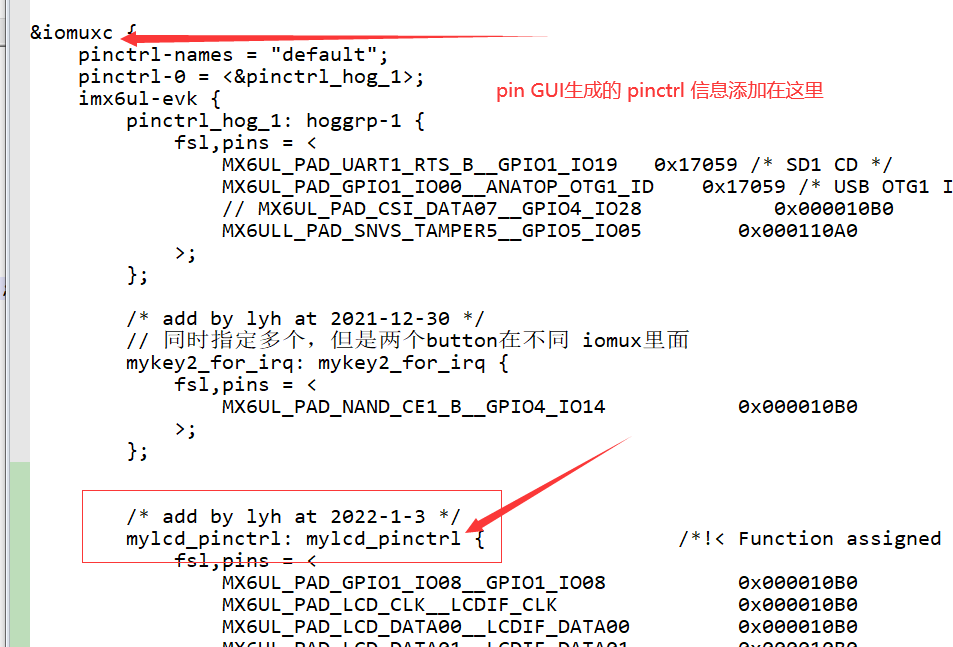
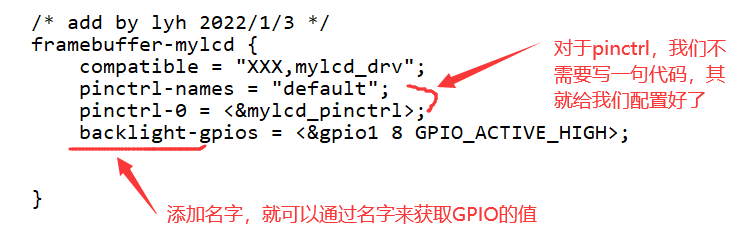
- 代码中,lcd 中使用 pinctrl 设置的引脚内核自动帮我们解析配置好了,唯一需要我们设置的就是 gpio 引脚
static struct gpio_desc *bl_gpio;
/* get gpio from device tree */
bl_gpio = gpiod_get(&pdev->dev, "backlight", 0);
/* config bl_gpio as output */
gpiod_direction_output(bl_gpio, 1);
/* 设置引脚值 */
gpiod_set_value(bl_gpio, 1);
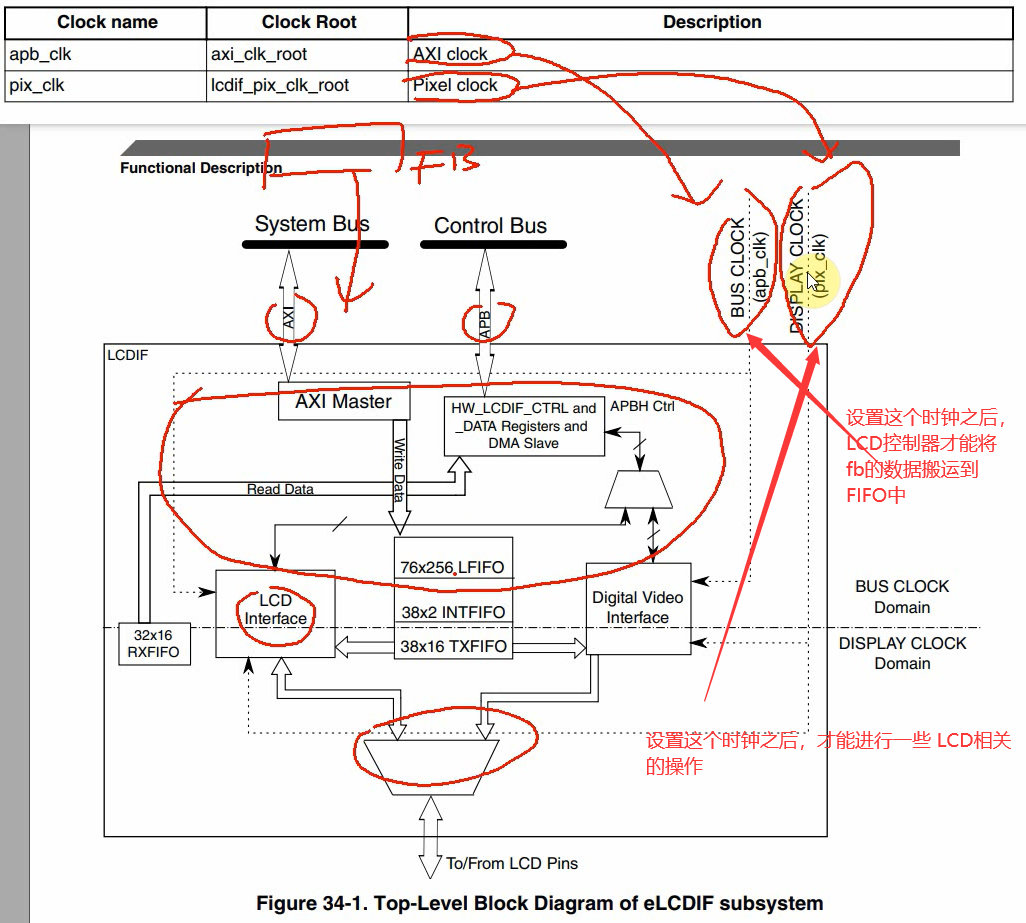
5.2.2 修改设备树配置时钟
- LCD控制器需要设置2个时钟
- 对于时钟的使能,我们可以参考裸机例程,对时钟的寄存器进行 ioremap ,然后直接怼寄存器就可以了
-
但是我们可以使用内核的时钟子系统,就可以更加方便的使用时钟
-
参考内核的时钟在设备树中是怎么设置的
- 参考:
arch/arm/boot/dts/imx6ull.dtsi - // 这个节点就没有使能,我们先不管它,需要使用到这个控制器
lcdif时,我们再引用这个节点使能就行
lcdif: lcdif@021c8000 {
compatible = "fsl,imx6ul-lcdif", "fsl,imx28-lcdif";
reg = <0x021c8000 0x4000>;
interrupts = <GIC_SPI 5 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_LCDIF_PIX>,
<&clks IMX6UL_CLK_LCDIF_APB>,
<&clks IMX6UL_CLK_DUMMY>;
clock-names = "pix", "axi", "disp_axi";
status = "disabled";
};
定义了3个时钟:
-
pix:Pixel clock,用于LCD接口,设置为LCD手册上的参数,主要是设置它的频率,
注意:像素时钟是和具体的LCD设备息息相关的,所以这个内核没有帮我们设置
-
axi:AXI clock,用于传输数据、读写寄存器,使能即可,系统上电内核就给这个时钟进行频率配置了
-
disp_axi:一个虚拟的时钟,可以不用设置
-
设备树修改完成如下:
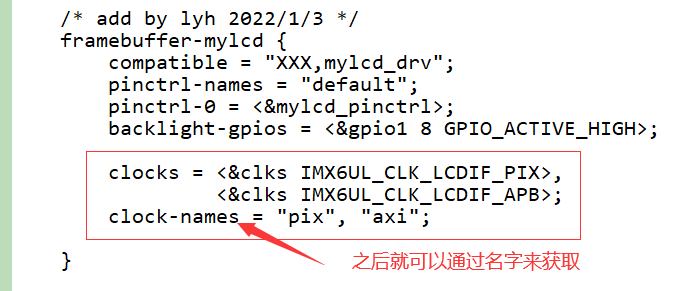
- 示例代码,还不能直接运行:可以通过设备树中的名字来获取时钟
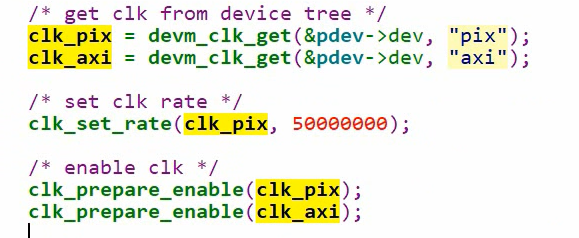
-
获得时钟
host->clk_pix = devm_clk_get(&host->pdev->dev, "pix"); if (IS_ERR(host->clk_pix)) { host->clk_pix = NULL; ret = PTR_ERR(host->clk_pix); goto fb_release; } host->clk_axi = devm_clk_get(&host->pdev->dev, "axi"); if (IS_ERR(host->clk_axi)) { host->clk_axi = NULL; ret = PTR_ERR(host->clk_axi); dev_err(&pdev->dev, "Failed to get axi clock: %d\n", ret); goto fb_release; } host->clk_disp_axi = devm_clk_get(&host->pdev->dev, "disp_axi"); if (IS_ERR(host->clk_disp_axi)) { host->clk_disp_axi = NULL; ret = PTR_ERR(host->clk_disp_axi); dev_err(&pdev->dev, "Failed to get disp_axi clock: %d\n", ret); goto fb_release; } -
设置频率:只需要设置pixel clock的频率
ret = clk_set_rate(host->clk_pix, PICOS2KHZ(fb_info->var.pixclock) * 1000U); -
使能时钟
clk_enable_pix(host); clk_prepare_enable(host->clk_pix); clk_enable_axi(host); clk_prepare_enable(host->clk_axi); clk_enable_disp_axi(host); clk_prepare_enable(host->clk_disp_axi);
5.2.3 修改设备树配置基本参数
-
需要根据 LCD的数据手册里面的参数来设置设备树的值
-
LCD 设备树要参考内核中写好的例程格式,这样的好处就是可以使用 内核提供的获取设备树信息的函数,可以用来解析设备树的 LCD节点的信息,从而可以使用这些信息来设置 LCD控制器的值。
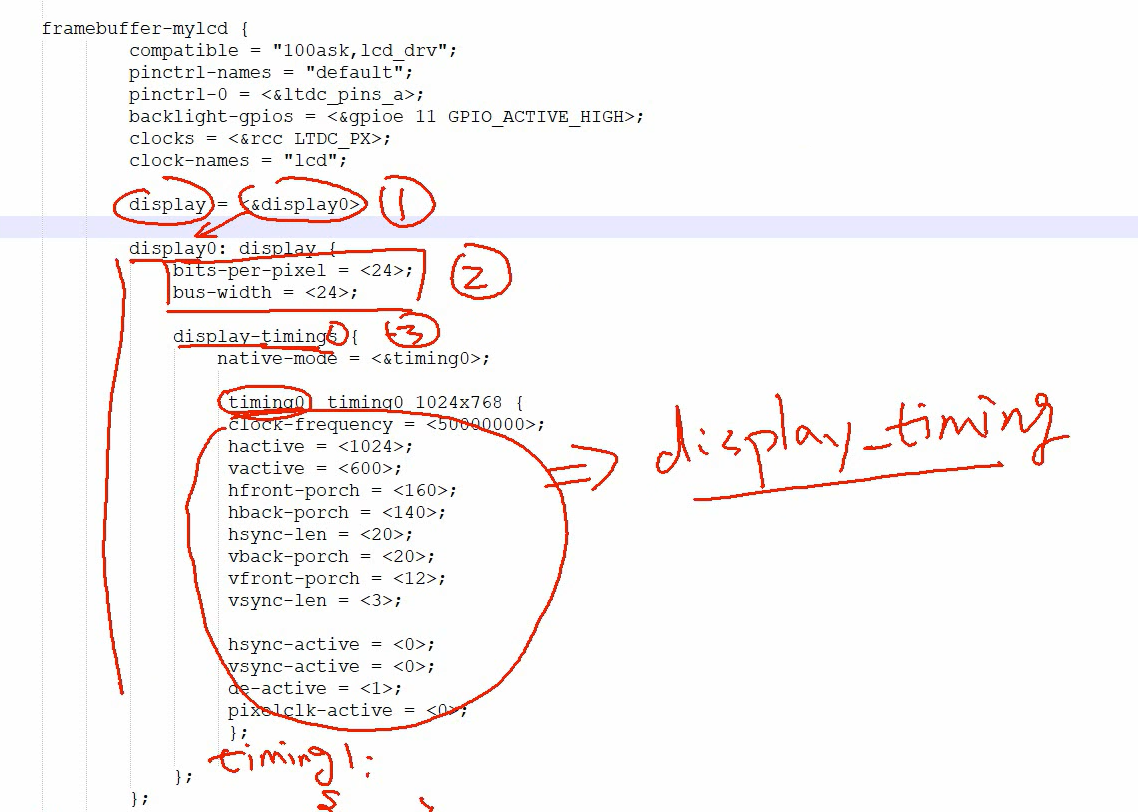
分析设备树的结构
- 1个timing 代表一个分辨率信息吧,可以有很多个 timing,但是对于嵌入式的 LCD,分辨率都是写死了的。
- display 代表我们要使用哪一个显示器
- display 中共用的属性,比如总线宽度、bpp 呀这些
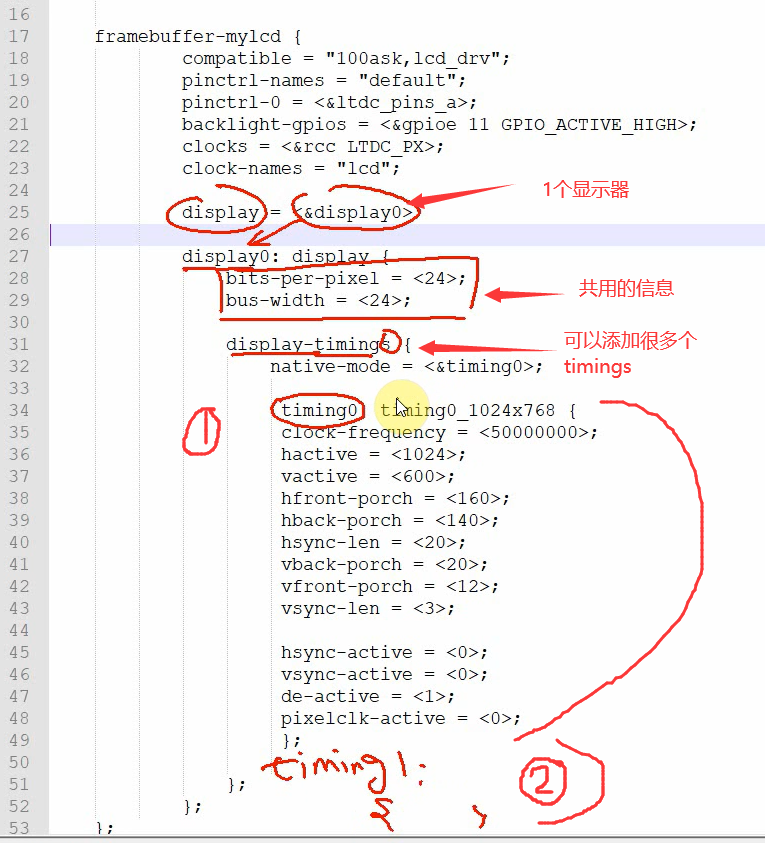
- 对于解析设备树,我们需要做的是3方面的事情
- 找到 dispaly节点
- 提取出里面的共用信息
- 找到里面的 timing 信息
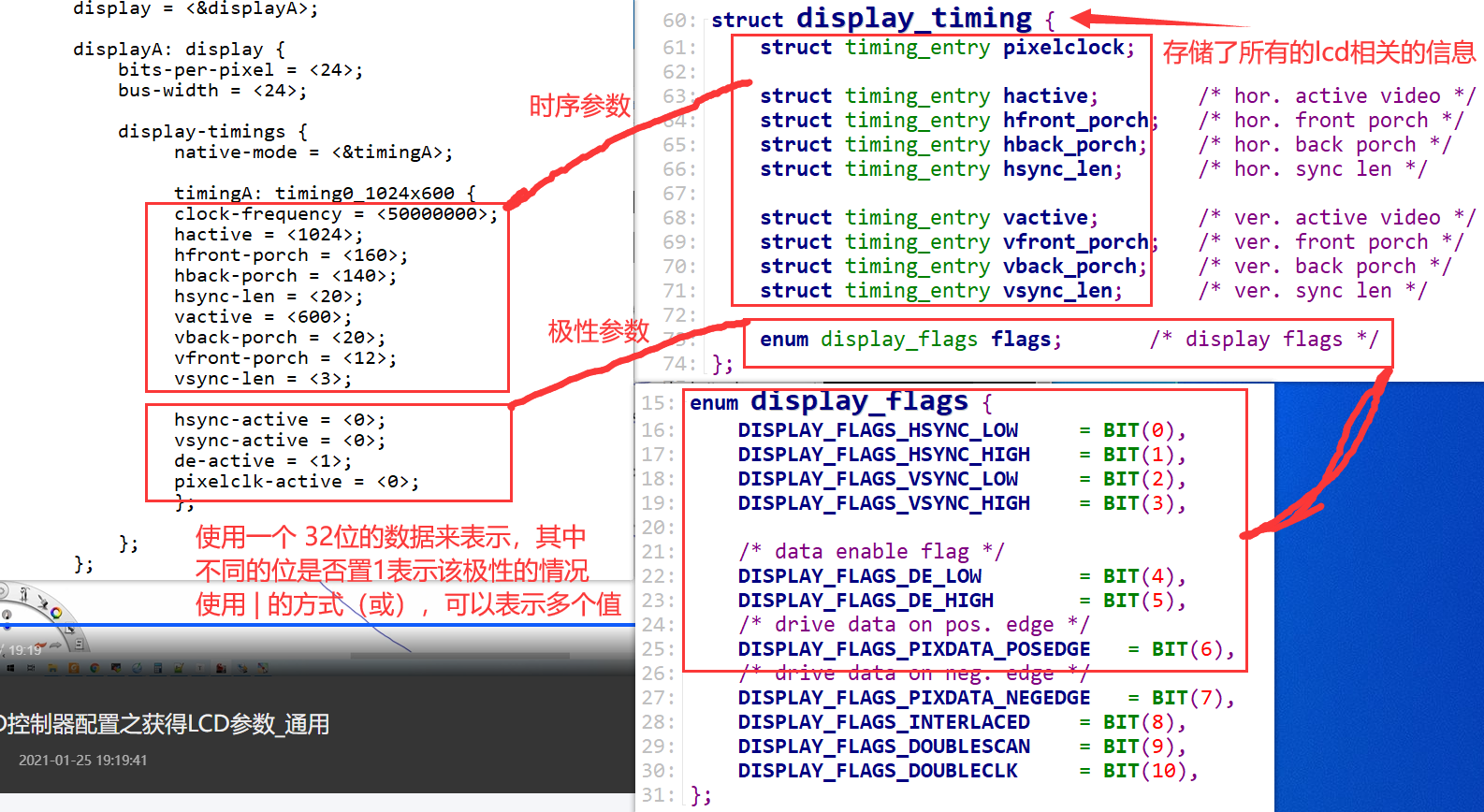
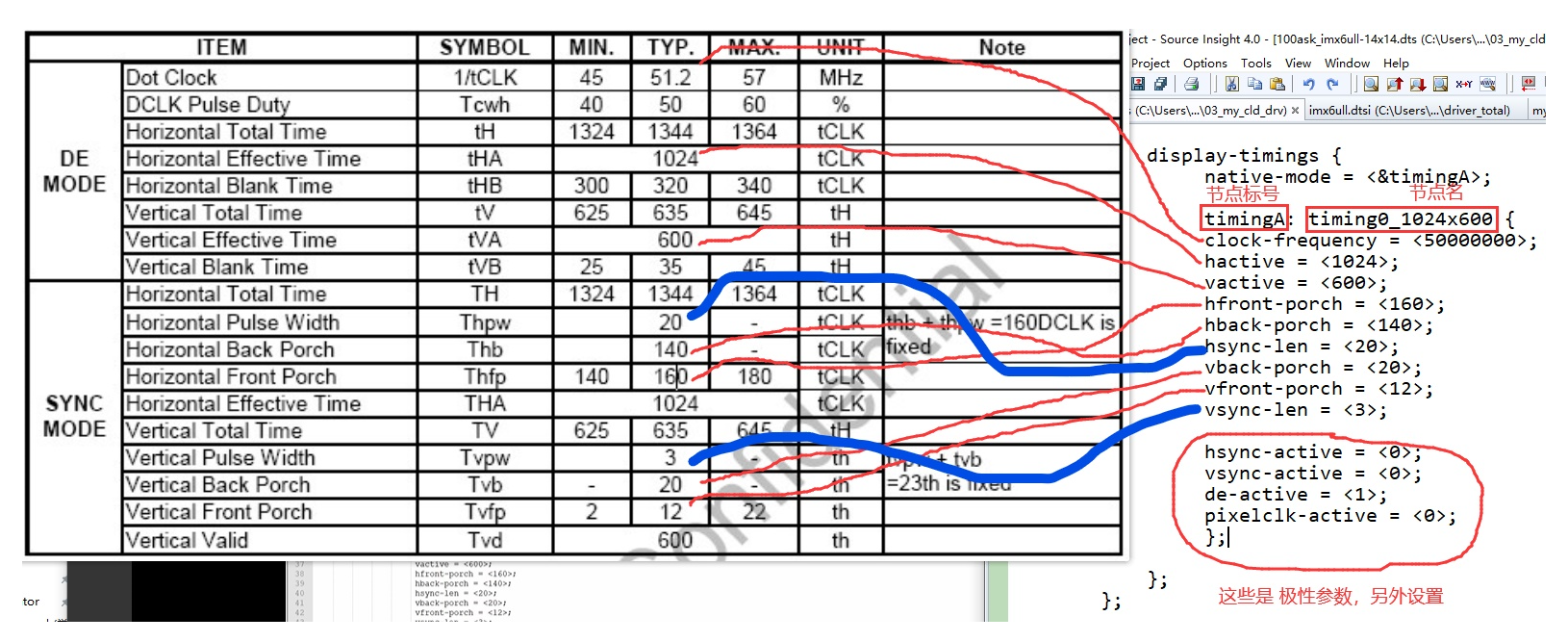
- 设备树参数和数据手册的对应关系(时序参数)
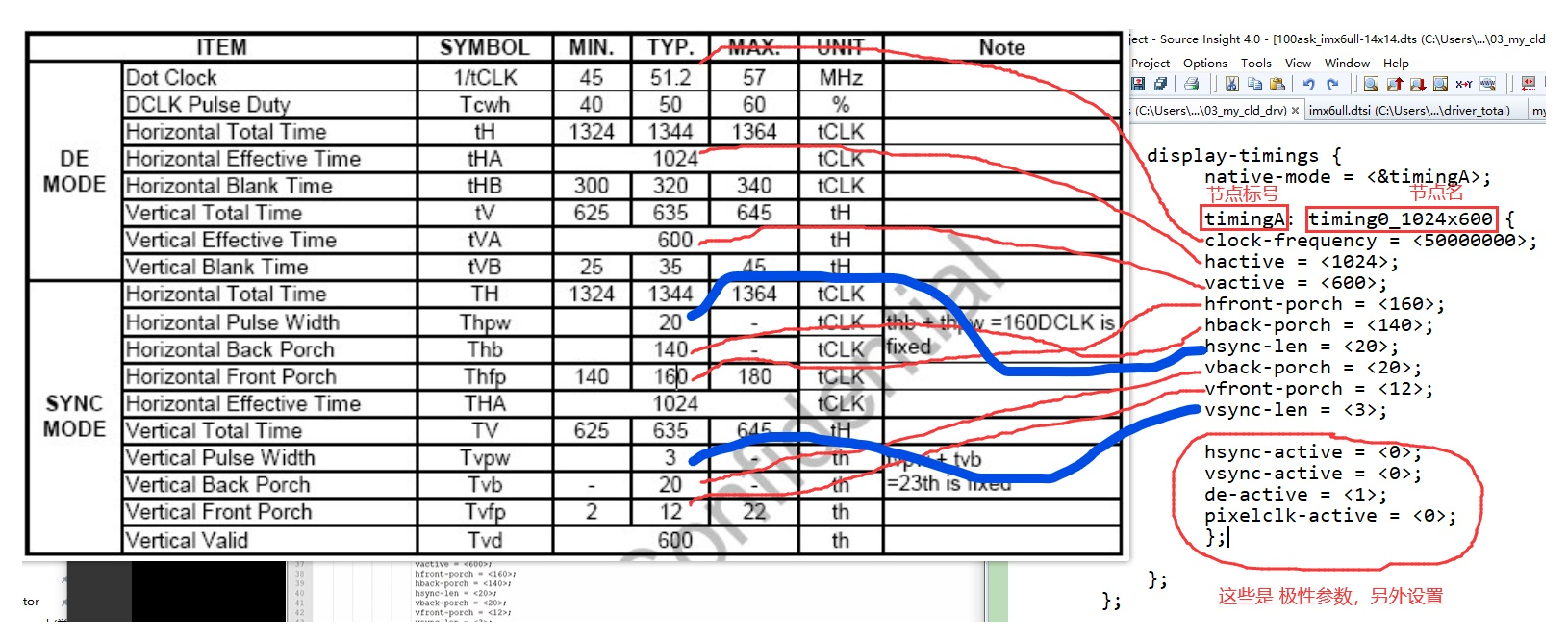
- 设备树参数和数据手册的对应关系(极性参数)

- 设备树中 LCD的节点结构是固定的,所以内核中必定有解析这个节点的函数,可以参考内核的驱动例程
-
drivers\video\of_display_timing.c -
drivers\video\fbdev\mxsfb.c
-
解析设备树之后的参数值,都保存在 display_timing 结构体中
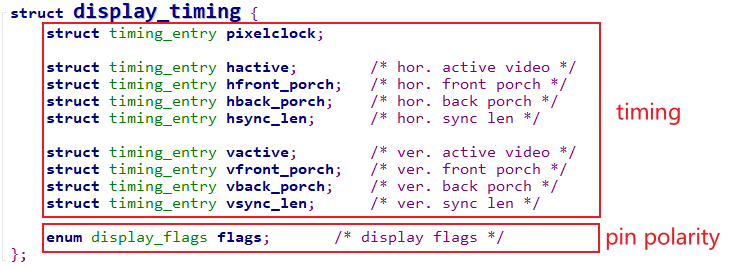
- 下面这个图表示了解析设备树之后,参数都保存到哪里了
5.2.4 使用设备树中解析出来的参数用于设置LCD控制器寄存器
-
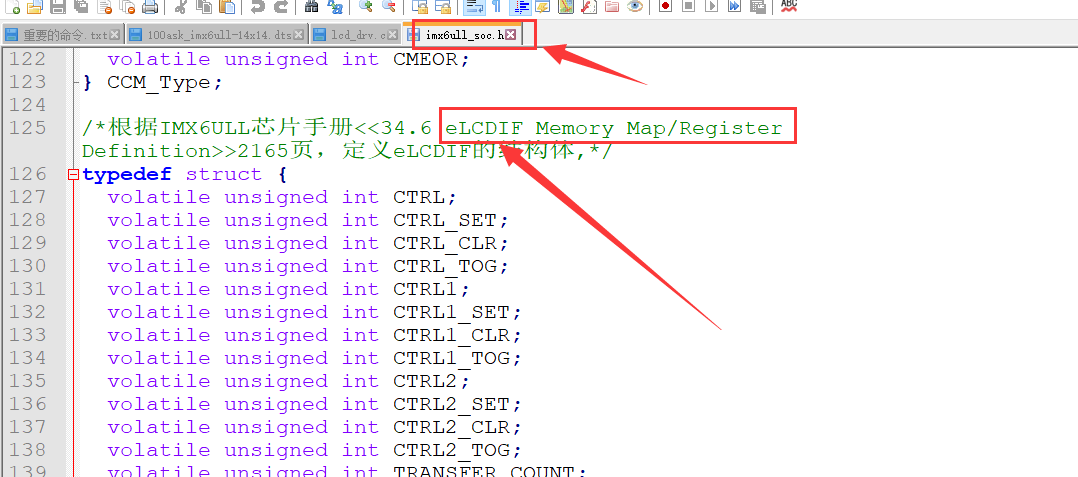
首先需要找到 LCDIF控制器的寄存器和地址的关系
在编写裸机程序的时候,imx6ull官方给我们提供了一个
imx6ull_soc.h头文件,里面定义了一些 lcdif 控制器的寄存器的地址,我们可以把这部分的内容复制出来。C:\Users\Administrator\Desktop\imx6ull\02_driver_total\doc_and_source_for_drivers\IMX6ULL\source\03_LCD\05_参考的裸机源码\02_dot_line_circle
根据芯片手册,一个一个设置寄存器:
-
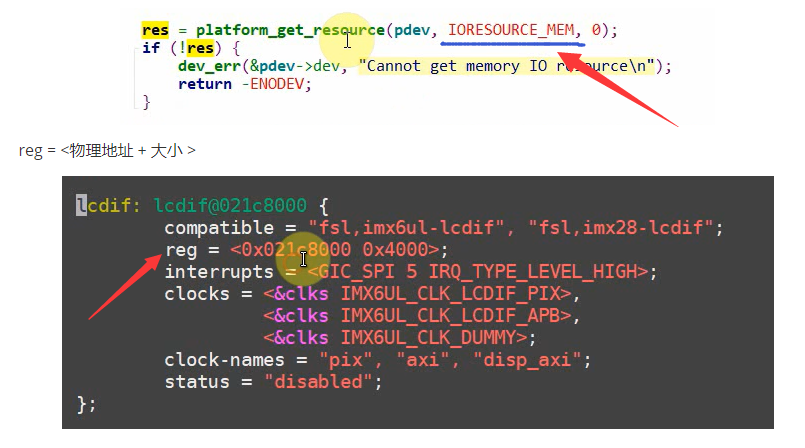
(1)Framebuffer地址设置
reg = <0x021c8000 0x4000>;查询芯片手册,然后在设备树中指定

如何从设备树中获取LCD的信息
-
(2)Framebuffer中数据格式设置
-
注意:LCD接口和framebuffer的数据位数的关系
第一个寄存器中的
LCDIF_CTRLn这个的设置问题:需要根据 LCD接口的 fb 格式来设置
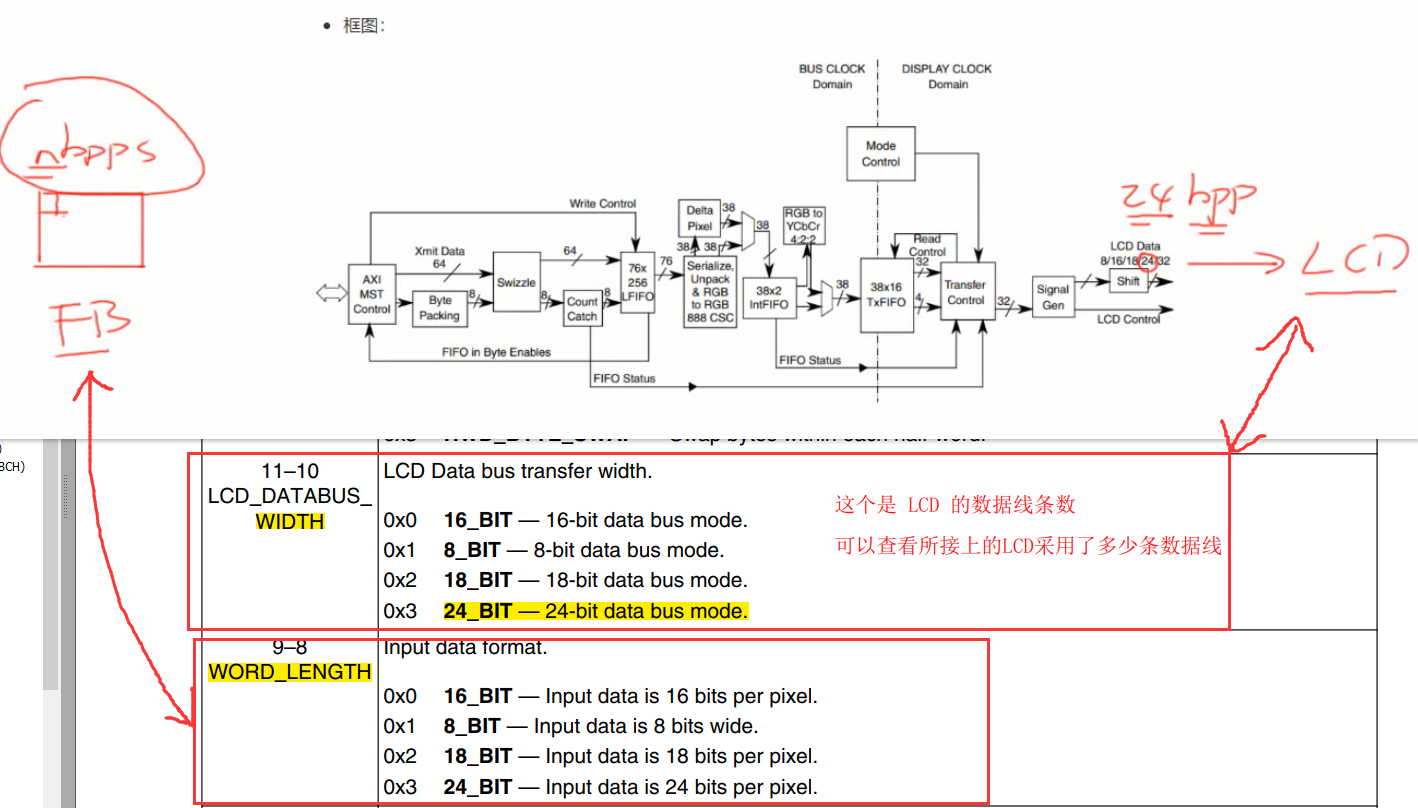
第一个寄存器中的
LCDIF_CTRL1n的这个位设置问题,主要是如何使用 32bit 的内存中4字节的问题 注意:这所说的数据格式,是
framebuffer中的数据存储格式,也就是CPU先写到framebuffer中的数据。
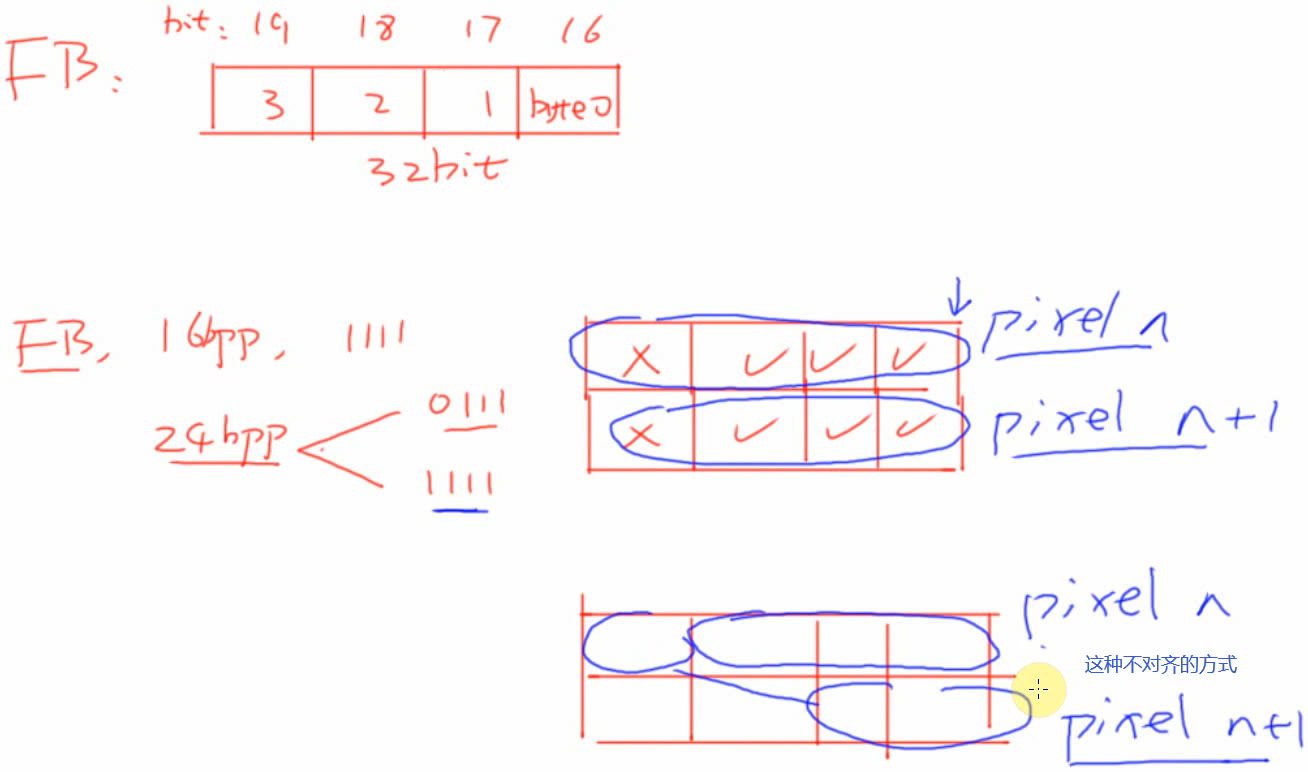
对于 24bpp,也就是 RGB 888格式,直接设置为 0111比较好,一个32bit数据保存一组 RGB888的值,最高一字节舍弃不用,如果使用 1111格式,全部字节都是用的话,有些 RGB888数据保存的格式就不对其,有点别扭。
对于 16bpp,设置为 1111,则高2字节可以保存,低2字节也可以保存,都使用上了。
所以在设置寄存器的参数的时候,要注意适配各种不同 bpp 的情况,分别处理。
-
-
(3)LCD时序参数设置
-
(4)LCD引脚极性设置
注意1:记得使能背光引脚和开启 lcd run,才能搬运数据和看到东西
注意2:先使能时钟,再去设置LCD控制器,没有使能时钟,设置也没有用
任务:根据程序中设置的值,对照数据手册,把每一个寄存器的设置原理都标记好
5.2.5 编写程序
编程的大体结构如下:
(1)从LCD设备树节点中提取出重要的参数信息
(2)通过 fb_info 结构体设置部分参数,通过寄存器 设置部分参数
5.2.6 编译程序报错
解决BUG1 (解决)
-
现象:LCD上没有企鹅LOGO,在终端中执行
ls -l /dev/fb0发现没有设备节点 -
观察内核启动信息,看到:
[ 0.619880] imx6ul-pinctrl 20e0000.iomuxc: pin MX6UL_PAD_GPIO1_IO08 already requested by 2080000.pwm; cannot claim for 21c8000.framebuffer-mylcd [ 0.619920] imx6ul-pinctrl 20e0000.iomuxc: pin-31 (21c8000.framebuffer-mylcd) status -22 [ 0.619954] imx6ul-pinctrl 20e0000.iomuxc: could not request pin 31 (MX6UL_PAD_GPIO1_IO08) from group mylcd_pingrp on device 20e0000.iomuxc [ 0.619985] mylcd 21c8000.framebuffer-mylcd: Error applying setting, reverse things back [ 0.620070] mylcd: probe of 21c8000.framebuffer-mylcd failed with error -22 -
原因:引脚冲突
- 设备树中pwm节点、framebuffer-mylcd节点,都使用到的同一个引脚:PAD_GPIO1_IO08
-
解决方法:修改
arch/arm/boot/dts/100ask_imx6ull-14x14.dts,禁止pwm节点,如下:

解决BUG2 (解决)
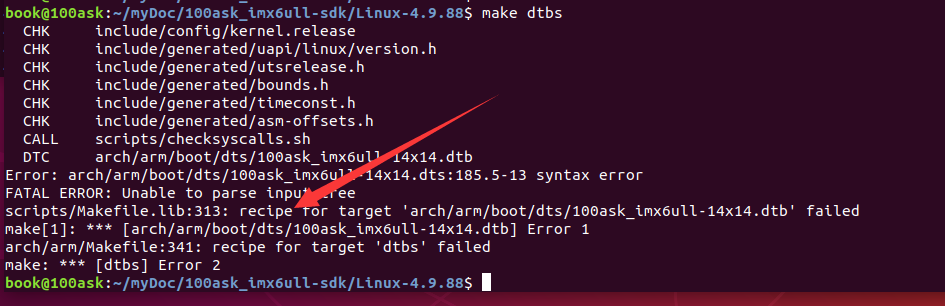
- 之前漏了 ; 号,看编译报错提示的行号来判断:185行
解决BUG3 (解决)
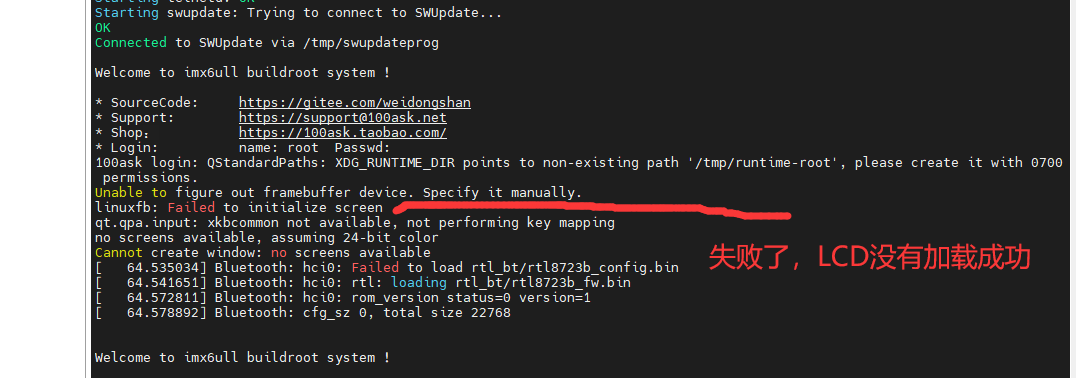
原来是之前 删除 /boot 目录中的设备树和zImage的时候,命令搞错了
rm /boot/100askxxx zImage
这样删除的是 /boot/100askxxx 和 本目录下的 zImage ,不匹配,所以就重启加载不成功,添加正确的 zImage 和 设备树,reboot就成功了。
5.2.7 实验现象
重启开发板观察现象
-
如果可以看到企鹅LOGO,就表示正常
-
如果在终端中可以查看到存在
/dev/fb0节点,也表示正常
6 LCD控制器寄存器简介
数据手册中 LCD的相关寄存器很多,主要就是下面的 10个,设置其中的某些位
查看任何芯片的LCD控制器寄存器时,记住几个要点:
① 怎么把LCD的信息告诉LCD控制器:即分辨率、行列时序、像素时钟等; ② 怎么把显存地址、像素格式告诉LCD控制器。
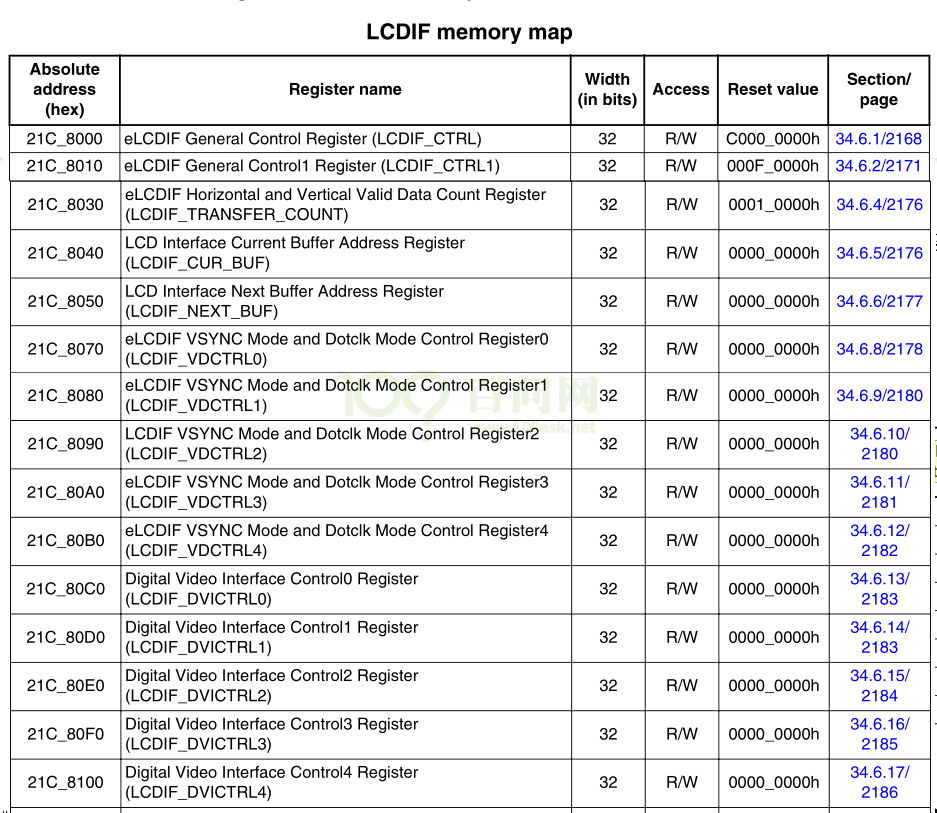
上图是我们将要使用到的寄存器,下面逐个讲解这些寄存器,在后续的LCD控制编程实验会用到。
6.1 LCDIF_CTRL寄存器
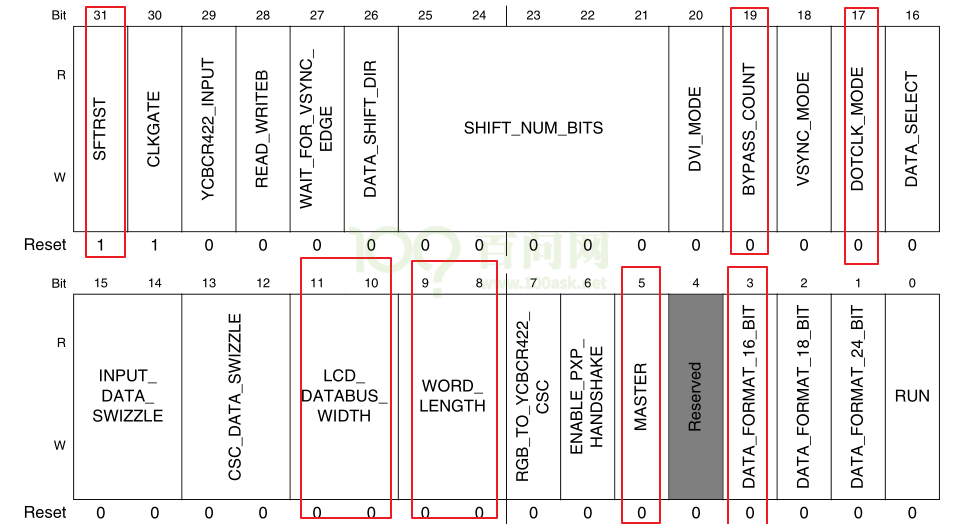
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31] | SFTRST | R/W | 软件复位,正常工作时应设为0;如果设为1,它会复位整个LCD控制器 |
| [30] | CLKGATE | R/W | 时钟开关, 0:正常工作时要设置为0; 1:关闭LCD控制器时钟 |
| [29] | YCBCR422_INPUT | R/W | 使用RGB接口时,设置为0;其他接口我们暂时不关心 |
| [28] | READ_WRITEB | R/W | 使用RGB接口时,设置为0;其他接口我们暂时不关心 |
| [27] | WAIT_FOR_VSYNC_EDGE | R/W | 在VSYNC模式时,设置为1;我们不关心 |
| [26] | DATA_SHIFT_DIR | R/W | 在DVI模式下才需要设置,我们不关心 |
| [25:21] | SHIFT_NUM_BITS | R/W | 在DVI模式下才需要设置,我们不关心 |
| [20] | DVI_MODE | R/W | 设置为1时,使用DVI模式,就是ITU-R BT.656数字接口 |
| [19] | BYPASS_COUNT | R/W | DOTCLK和DVI模式下需要设置为1;MPU、VSYNC模式时设为0 |
| [18] | VSYNC_MODE | R/W | 使用VSYNC模式时,设置为1 |
| [17] | DOTCLK_MODE | R/W | 使用DOTCLK模式时,设置为1;本实验用的就是这个模式 |
| [16] | DATA_SELECT | R/W | MPU模式下才用到,我们不关心 |
| [15:14] | INPUT_DATA_SWIZZLE | R/W | 显存中像素颜色的数据转给LCD控制器时,字节位置是否交换: 0x0:NO_SWAP,不交换; 0x0:LITTLE_ENDIAN,小字节序,跟NO_SWAP一样; 0x1:BIG_ENDIAN_SWAP,字节0、3交换;字节1、2交换; 0x1:SWAP_ALL_BYTES,字节0、3交换;字节1、2交换; 0x2:HWD_SWAP,半字交换,即0x12345678转为0x56781234 0x3:HWD_BYTE_SWAP,在每个半字内部放换字节, 即0x12345678转换为0x34127856 |
| [13:12] | CSC_DATA_SWIZZLE | R/W | 显存中的数据被传入LCD控制器内部并被转换为24BPP后,在它被转给LCD接口之前,字节位置是否交换: 0x0:NO_SWAP,不交换; 0x0:LITTLE_ENDIAN,小字节序,跟NO_SWAP一样; 0x1:BIG_ENDIAN_SWAP,字节0、3交换;字节1、2交换; 0x1:SWAP_ALL_BYTES,字节0、3交换;字节1、2交换; 0x2:HWD_SWAP,半字交换,即0x12345678转为0x56781234 0x3:HWD_BYTE_SWAP,在每个半字内部放换字节, 即0x12345678转换为0x34127856 |
| [11:10] | LCD_DATABUS_WIDTH | R/W | LCD数据总线宽度,就是对外输出的LCD数据的位宽, 0x0:16位; 0x1:8位; 0x2:18位; 0x3:24位 |
| [9:8] | WORD_LENGTH | R/W | 输入的数据格式,即显存中每个像素占多少位, 0x0:16位; 0x1:8位; 0x2:18位; 0x3:24位 |
| [7] | RGB_TO_YCBCR422_CSC | R/W | 设置为1时,使能颜色空间转换:RGB转为YCbCr |
| [6] | ENABLE_PXP_HANDSHAKE | R/W | 当LCDIF_MASTER设置为1时,再设置这位, 则LCD控制器跟PXP之间的握手机制被关闭(我们不关心) |
| [5] | MASTER | R/W | 设置为1时,LCD控制器成为bus master |
| [4] | RSRVD0 | R/W | 保留 |
| [3] | DATA_FORMAT_16_BIT | R/W | WORD_LENGTH为0时,表示一个像素用16位,此位作用如下: 0:数据格式为ARGB555; 1:数据格式为RGB565 |
| [2] | DATA_FORMAT_18_BIT | R/W | WORD_LENGTH为2时,表示一个像素用18位,RGB数据还是保存在32位数据里,此位作用如下: 0:低18位用来表示RGB666,高14位无效 1:高18位用来表示RGB666,低14位无效 |
| [1] | DATA_FORMAT_24_BIT | R/W | WORD_LENGTH为3时,表示一个像素用24位,此位作用如下: 0:所有的24位数据都有效,格式为RGB888 1:转给LCD控制器的数据是24位的,但只用到其中的18位, 每个字节用来表示一个原色,每字节中高2位无效 |
| [0] | RUN | R/W | 使能LCD控制器,开始传输数据 |
6.2 LCDIF_CTRL1寄存器
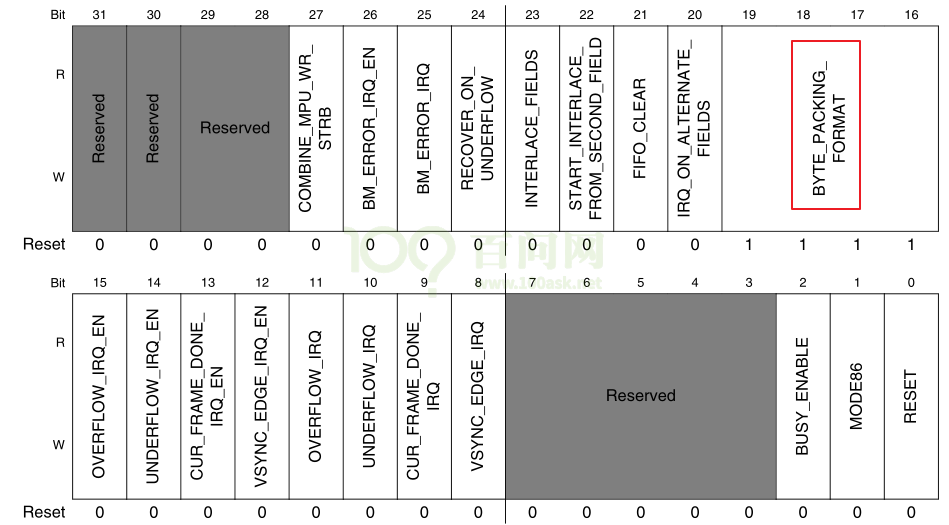
本实验中使用TFT LCD,LCD控制器使用DOTCLK模式。本寄存器中其他用不到的位,就不介绍了。
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [19:16] | BYTE_PACKING_FORMAT | R/W | 用来表示一个32位的word中,哪些字节是有效的,即哪些字节是用来表示颜色的。 bit16、17、18、19分别对应byte0、1、2、3;某位为1,就表示对应的字节有效。 默认值是0xf,表示32位的word中,所有字节都有效。 对于8bpp,可以忽略本设置,所有的字节都是有效的; 对于16bpp,bit[1:0]、bit[3:2]分别对应一个字节,组合中的2位都为1时,对应的字节才有效; 对于24bpp,0x7表示32位数据中只用到3个字节,这称为“24 bit unpacked format”,即ARGB,其中的A字节被丢弃 |
| [0] | RESET | R/W | 用来复位了接的LCD, 0:LCD_RESET引脚输出低电平; 1:LCD_RESET引脚输出高电平 |
6.3 LCDIF_TRANSFER_COUNT寄存器
![]()
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:16] | V_COUNT | R/W | 一帧中,有多少行有效数据 |
| [15:0] | H_COUNT | R/W | 一行中,有多少个像素 |
6.4 LCDIF_VDCTRL0寄存器
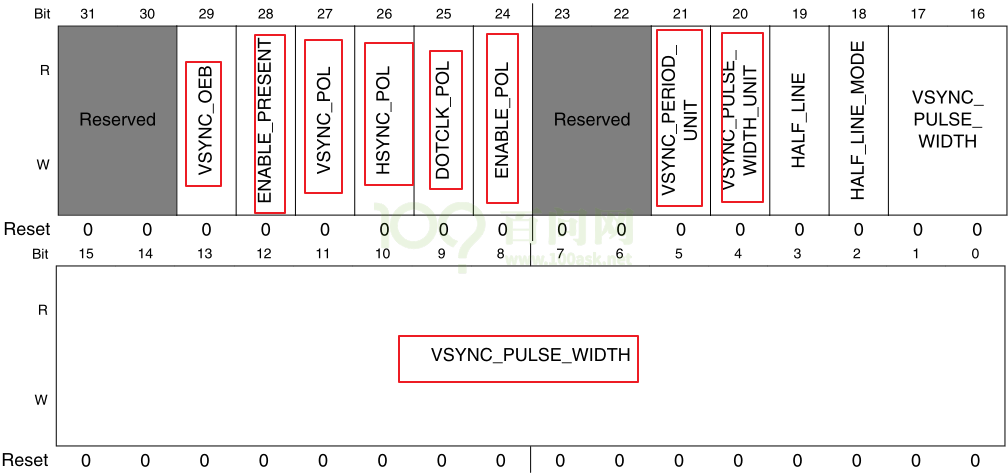
本寄存器用来设置Vsync信号相关的时序,及极性。
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [29] | VSYNC_OEB | R/W | 用来控制VSYNC信号,对于DOTCLK模式,设为0, 0:VSYNC是输出引脚,用LCD控制器产生; 1:VSYNC是输入引脚 |
| [28] | ENABLE_PRESENT | R/W | 在DOTCLK模式下,硬件是否会产生数据使能信号ENALBE: 0:不产生; 1:产生 |
| [27] | VSYNC_POL | R/W | 用来决定VSYNC脉冲的极性, 0:低脉冲; 1:高脉冲 |
| [26] | HSYNC_POL | R/W | 用来决定HSYNC脉冲的极性, 0:低脉冲; 1:高脉冲 |
| [25] | DOTCLK_POL | R/W | 用来决定DOTCLK的极性, 0:LCD控制器在DOTCLK下降沿发送数据,LCD在上升沿捕获数据; 1:反过来 |
| [24] | ENABLE_POL | R/W | 用来决定ENABLE信号的极性, 0:数据有效期间,ENABLE信号为低; 1:反过来 |
| [21] | VSYNC_PERIOD_UNIT | R/W | 用来决定VSYNC_PERIOD的单位, 0:单位是像素时钟(pix_clk),这在VSYNC模式下使用; 1:单位是“整行”,这在DOTCLK模式下使用 |
| [20] | VSYNC_PULSE_WIDTH_UNIT | R/W | 用来决定VSYNC_PULSE_WIDTH的单位, 0:单位是像素时钟(pix_clk); 1:单位是“整行” |
| [19] | HALF_LINE | R/W | VSYNC周期是否周加上半行的时间, 0:VSYNC周期=VSYNC_PERIOD; 1:VSYNC周期=VSYNC_PERIOD+HORIZONTAL_PERIOD/2 |
| [18] | HALF_LINE_MODE | R/W | 0:第1帧将在一行的中间结束,第2帧在一行的中间开始; 1:所有帧结束前都加上半行时间,这样所有帧都会起始于“行的开头” |
| [17:0] | VSYNC_PULSE_WIDTH | R/W | VSYNC脉冲的宽度 |
6.5 LCDIF_VDCTRL1寄存器

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [29] | VSYNC_PERIOD | R/W | 两个垂直同步信号之间的间隔,即垂直方向同步信号的总周期; 单位由VSYNC_PERIOD_UNIT决定 |
6.6 LCDIF_VDCTRL2寄存器

HSYNC_PULSE_WIDTH:水平同步信号脉冲宽度;
HSYNC_PERIOD:两个水平同步信号之间的总数,即水平方向同步信号的总周期
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:18] | HSYNC_PULSE_WIDTH | R/W | HSYNC脉冲的宽度(单位:pix_clk) |
| [17:0] | HSYNC_PERIOD | R/W | 整行的宽度,即两个HYSNC信号之间的宽度(单位:pix_clk) |
6.7 LCDIF_VDCTRL3寄存器
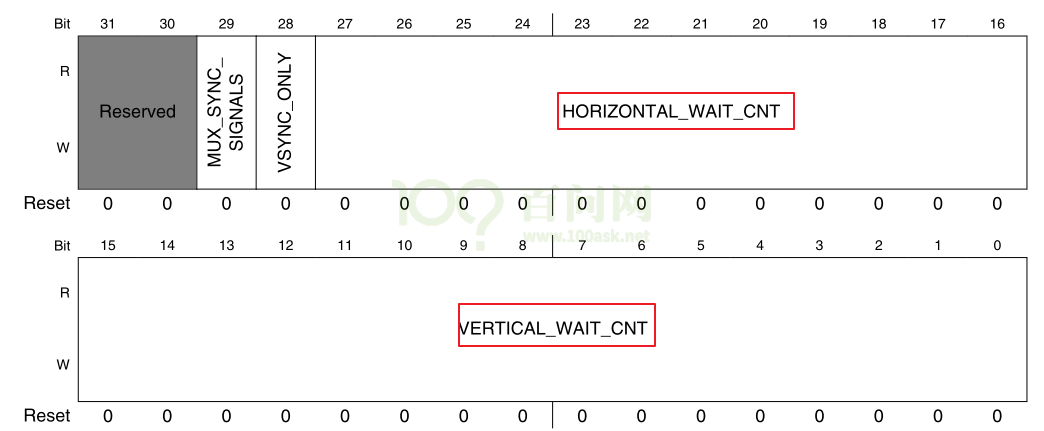
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [29] | MUX_SYNC_SIGNALS | R/W | 用不着 |
| [28] | VSYNC_ONLY | R/W | 0:DOTCLK模式时必须设置为0; 1:VSYNC模式时必须设置为1 |
| [27:16] | HORIZONTAL_WAIT_CNT | R/W | 水平方向上的等待像素个数,等于thp+thb |
| [15:0] | VERTICAL_WAIT_CNT | R/W | 垂直方向上的等待行数,等于tvp+tvb |
6.8 LCDIF_VDCTRL4寄存器
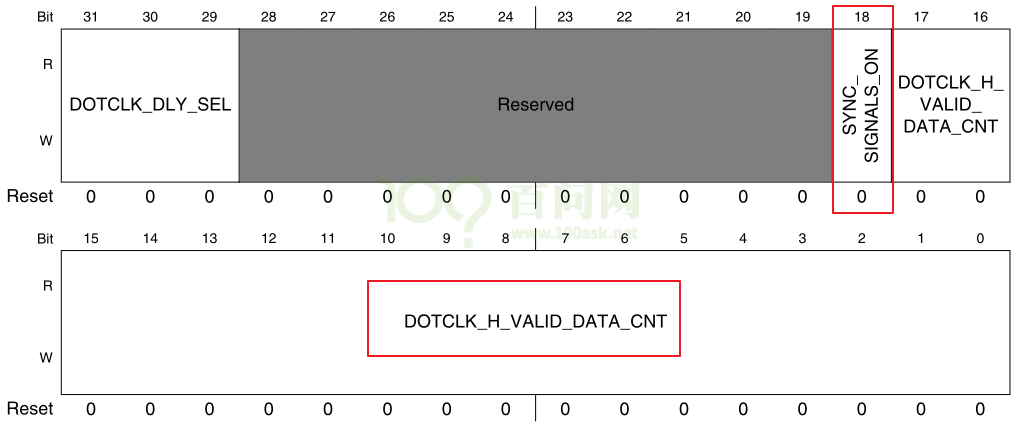
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:29] | DOTCLK_DLY_SEL | R/W | 在LCD控制器内部的DOTCLK输出到LCD_DOTCK引脚时,延时多久: 0:2ns; 1:4ns; 2:6ns; 3:8ns; 其他值保留 |
| [18] | SYNC_SIGNALS_ON | R/W | DOTCLK模式下必须设为1 |
| [17:0] | DOTCLK_H_VALID_DATA_CNT | R/W | 水平方向上的有效像素个数(pix_clk),即分辨率的y |
6.9 LCDIF_CUR_BUF寄存器

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:0] | ADDR | R/W | LCD控制器正在传输的当前帧在显存中的地址 |
6.10 LCDIF_NEXT_BUF寄存器

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:0] | ADDR | R/W | 下一帧在显存中的地址 |
LCD控制器传输完当前帧后,会把LCDIF_NEXT_BUF寄存器的值复制到LCDIF_CUR_BUF寄存器。
// 3. 设置具体的寄存器,总共有 10 个
// 3.1
/*
* 初始化LCD控制器的CTRL寄存器
* [31] : 0 : 正常模式必须设置为0
* [30] : 0 : 正常模式必须设置为0
* [29] : 0 : 设置为0代表从RGB颜色区域中获取数据
* [28] : 0 : TFT-RGB接口时,设置为0,8080接口设置为1
* [27:21] : 0 : 不用管
* [20] : 0 : 没有使用这种模式
* [19] : 1 : DOTCLK和DVI modes需要设置为1
* [18] : 0 : 没有使用这种模式
* [17] : 1 : 设置为1工作在DOTCLK模式
* [16] : 0 : 8080接口模式下,设置发出去的是命令还是数据本身
* [15:14] : 00 : 输入数据不交换(小端模式)默认就为0,不需设置
* [13:12] : 00 : CSC数据不交换(小端模式)默认就为0,不需设置
* [11:10] : 11 : 数据总线为24bit,也就是 LCD屏幕的RGB总线条数
* [9:8] 根据显示屏资源文件bpp来设置:8位0x1 , 16位0x0 ,24位0x3,也就是 framebuffer的RGB格式
* [7:6] : 0 : 不用管
* [5] : 1 : 设置elcdif工作在主机模式,主动去获取fb数据刷新到lcd屏幕上
* [4] : 0 : 保留位
* [3] : 0 : fb使用 RGB565,设置为1代表使用 RGB555
* [2] : 0 : 不用管
* [1] : 0 : 24位数据均是有效数据,默认就为0,不需设置
* [0] : 0 : 设置为1,马上进行数据传输
*/
lcdif->CTRL = (0<<30) | (0<<29) | (0<<28) | (1<<19) | (1<<17) | (lcd_data_bus_width << 10) |\
(fb_width << 8) | (1<<5);
// 3.2
/*
* 设置ELCDIF的寄存器CTRL1
* 根据bpp设置,bpp为24或32才设置
* [19:16] : 111 :表示ARGB传输格式模式下,传输24位无压缩数据,A通道不用传输)
*/
if(fb_bpp == 24 || fb_bpp == 32)
{
lcdif->CTRL1 &= ~(0xf << 16); // 先清除 ~0x1111
lcdif->CTRL1 |= (0x7 << 16); // 再设置 0x0111
}
else
{
// 对于 RGB565=16 的 fb_buffer 格式
// 设置为 1111 可以一个 32bit 数据保存2个RGB数据
lcdif->CTRL1 |= (0xf << 16);
}
// 3.3
/*
* 设置ELCDIF的寄存器TRANSFER_COUNT寄存器
* [31:16] : 垂直方向上的像素个数:600
* [15:0] : 水平方向上的像素个数:1024
* 是可以显示出来的像素个数
*/
lcdif->TRANSFER_COUNT = (dt->vactive.typ << 16) | (dt->hactive.typ << 0);
// 3.4
/*
* 设置ELCDIF的VDCTRL0寄存器
* [29] 0 : VSYNC输出 ,默认为0,无需设置
* [28] 1 : 在DOTCLK模式下,设置1硬件会产生使能ENABLE输出
* [27] 0 : VSYNC低电平有效 ,根据屏幕配置文件将其设置为0
* [26] 0 : HSYNC低电平有效 , 根据屏幕配置文件将其设置为0
* [25] 1 : DOTCLK下降沿有效 ,根据屏幕配置文件将其设置为1
* [24] 1 : ENABLE信号高电平有效,根据屏幕配置文件将其设置为1
* [21] 1 : 帧同步周期单位,DOTCLK mode设置为1
* [20] 1 : 帧同步脉冲宽度单位,DOTCLK mode设置为1
* [17:0] : vysnc脉冲宽度
*/
lcdif->VDCTRL0 = (1 << 28)|( vsync_pol << 27)\
|( hsync_pol << 26)\
|( clk_pol << 25)\
|( de_pol << 24)\
|(1 << 21)|(1 << 20)|( dt->vsync_len.typ << 0);
// 3.5
/*
* 设置ELCDIF的VDCTRL1寄存器
* 设置垂直方向的总周期:上黑框tvb+垂直同步脉冲tvp+垂直有效高度yres+下黑框tvf
*/
lcdif->VDCTRL1 = dt->vback_porch.typ + dt->vsync_len.typ + dt->vactive.typ + dt->vfront_porch.typ;
// 3.6
/*
* 设置ELCDIF的VDCTRL2寄存器
* [18:31] : 水平同步信号脉冲宽度
* [17: 0] : 水平方向总周期
* 设置水平方向的总周期:左黑框thb+水平同步脉冲thp+水平有效高度xres+右黑框thf
*/
lcdif->VDCTRL2 = (dt->hsync_len.typ << 18) | (dt->hback_porch.typ + dt->hsync_len.typ + dt->hactive.typ + dt->hfront_porch.typ);
// 3.7
/*
* 设置ELCDIF的VDCTRL3寄存器
* [27:16] :水平方向上的等待时钟数 =thb + thp
* [15:0] : 垂直方向上的等待时钟数 = tvb + tvp
*/
lcdif->VDCTRL3 = ((dt->hback_porch.typ + dt->hsync_len.typ) << 16) | (dt->vback_porch.typ + dt->vsync_len.typ);
// 3.8
/*
* 设置ELCDIF的VDCTRL4寄存器
* [18] 使用VSHYNC、HSYNC、 DOTCLK模式此为置1
* [17:0] : 水平方向的宽度: 1024
* 是可以显示出来的像素个数
*/
lcdif->VDCTRL4 = (1<<18) | (dt->hactive.typ);
// 3.9 3.10
/*
* 设置ELCDIF的CUR_BUF和NEXT_BUF寄存器
* CUR_BUF : 当前显存地址,eLCDI控制将从这个地址获取数据
* NEXT_BUF : 下一帧显存地址
* 方便运算,都设置为同一个显存地址
*/
lcdif->CUR_BUF = fb_phy; // 所以双 buffer 是不是要在这里动手脚
lcdif->NEXT_BUF = fb_phy;
7 LCD显示时序和对应时序参数的关系
7.1 使用同步模式下的解释
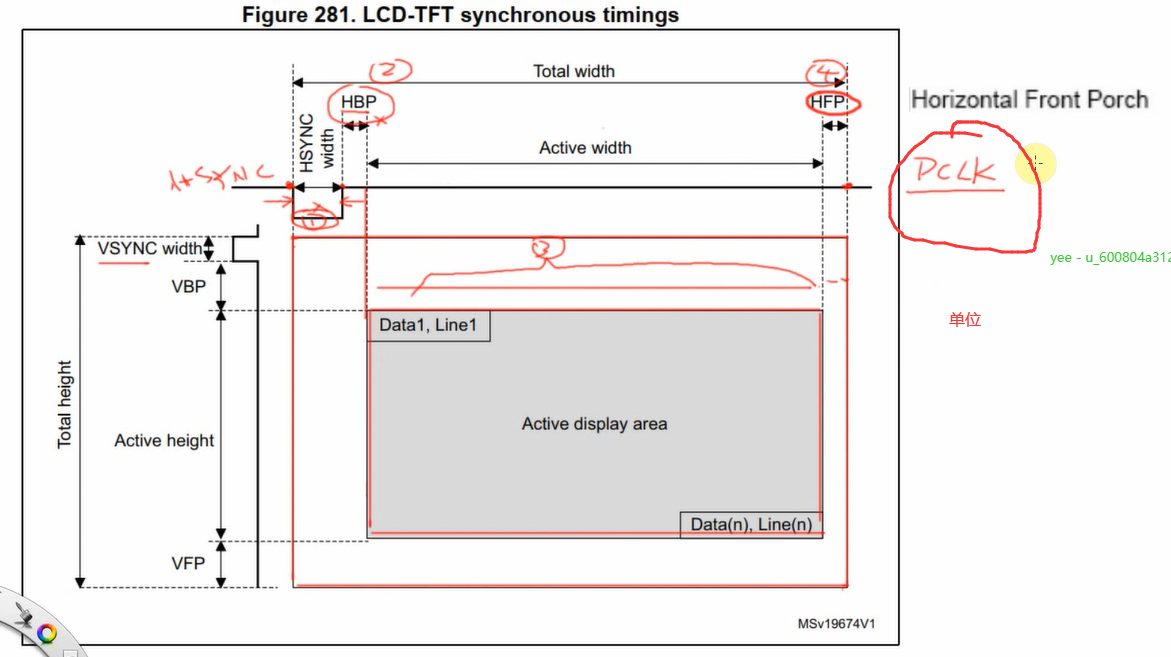
水平方向:HSYNC、HBP、ACTIVE_WIDTH、HFP
- HSYNC是水平提示信号,经过HSYNC个clk(LCD的时钟)之后,提醒LCD控制器需要换行了,然后前面和后面的HBP个和HFP个clk,这时候打印出来的像素点是不显示在屏幕上的
- ACTIVE_WIDTH 中的每一个 clk,对应一个像素点的显示
注意:这些时序信号应该是CPU需要发出的,然后通知LCD控制器应该怎么做
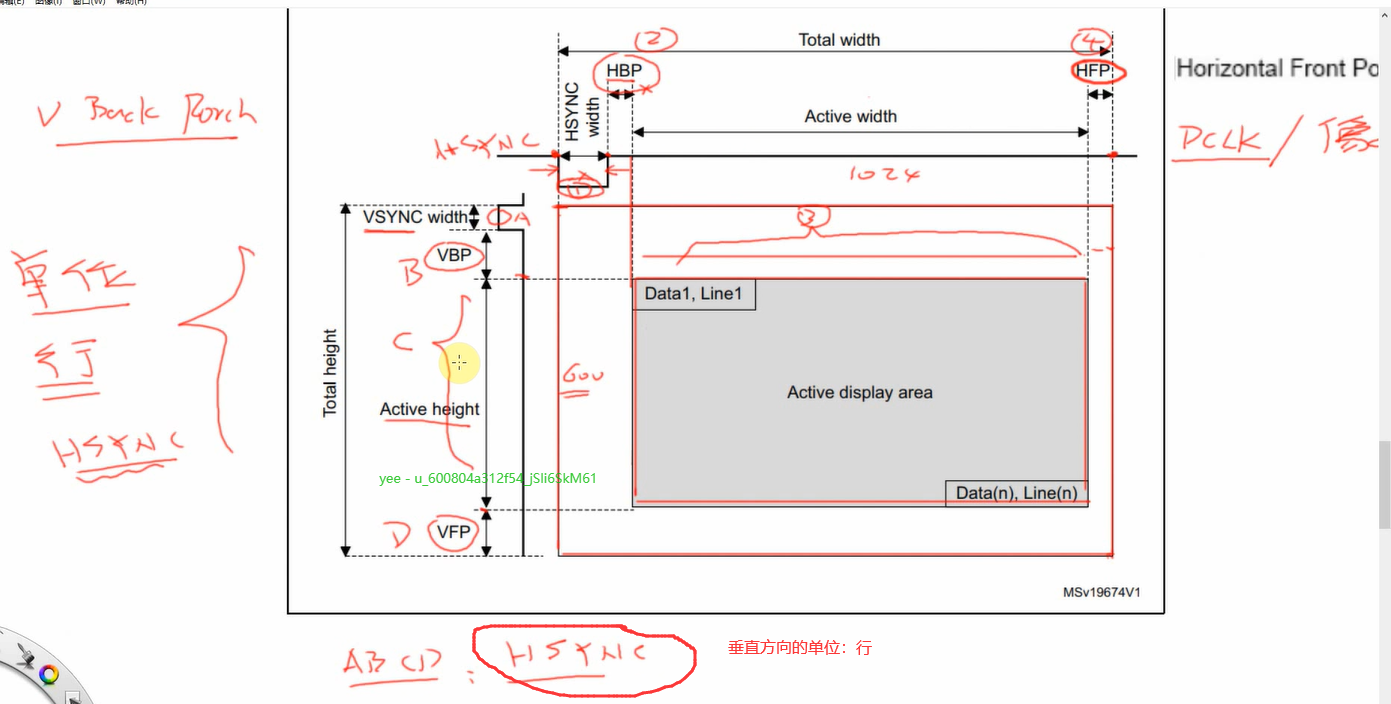
垂直方向:VSYNC 、VBP、ACTIVE_HEIGHT、VFP
- VSYNC是垂直提示信号,经过VSYNC个clk(LCD的时钟)之后,提醒LCD控制器需要换行了,然后前面和后面的VBP个和VFP个clk,这时候打印出来的像素点是不显示在屏幕上的
- ACTIVE_HEIGHT 中的每一个 clk,对应一个像素点的显示
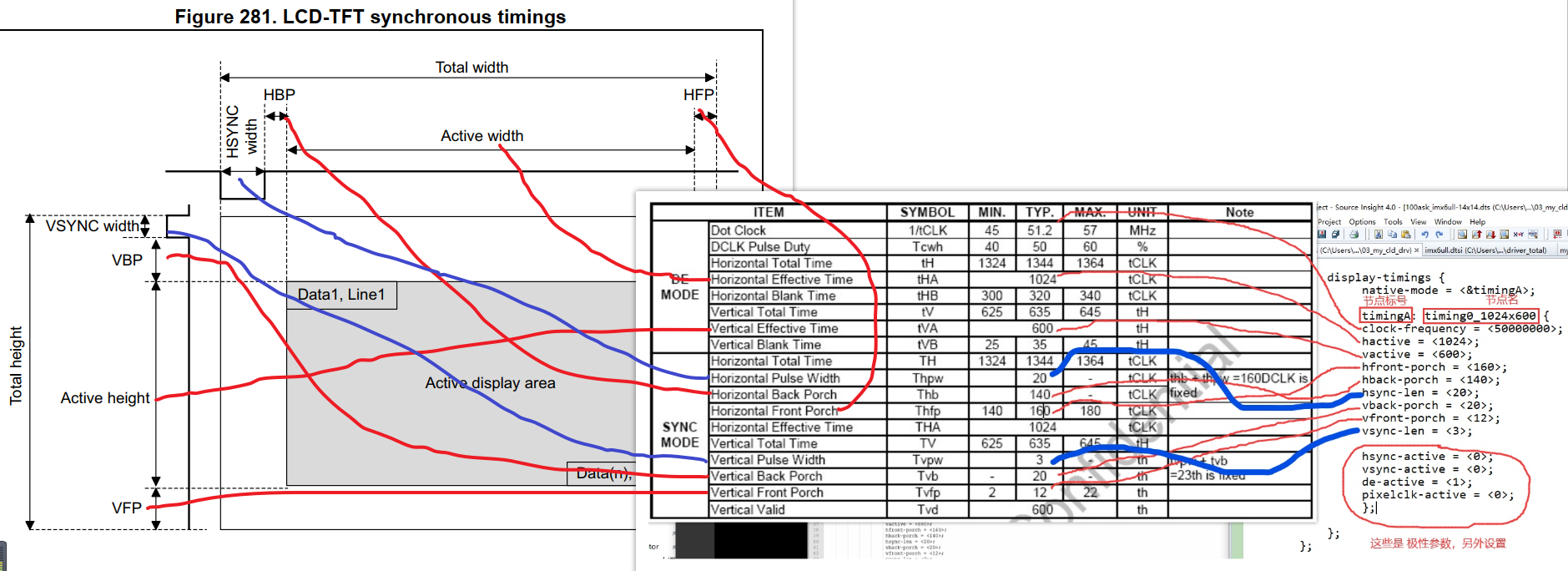
7.2 重要的时序对应关系图
- 两个图对照起来了,之后接上新的LCD的时候,按照这个图一样,参考数据的手册的参数进行设置就行了
8 修改回原来的系统
(1)


(2)
(3)重新编译zImage和dtbs
(4)复制到 /boot 中重启
9 双buffer
9.1 单Buffer的缺点
APP和LCD控制器都同时使用一个 buffer 就会有问题,APP访问太快或者太慢都会有问题。
APP在写buffer的时候,LCD控制器也在搬运buffer的数据,两边同时进行就会有问题
-
如果APP速度很慢,可以看到它在LCD上缓慢绘制图案
-
即使APP速度很高,LCD控制器不断从Framebuffer中读取数据来显示,而APP不断把数据写入Framebuffer
-
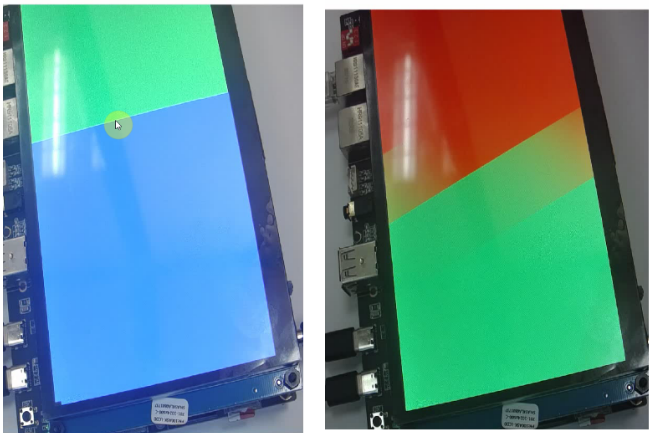
假设APP想把LCD显示为整屏幕的蓝色、红色
-
很大几率出现这种情况:
- LCD控制器读取Framebuffer数据,读到一半时,在LCD上显示了半屏幕的蓝色
- 这是APP非常高效地把整个Framebuffer的数据都改为了红色
- LCD控制器继续读取数据,于是LCD上就会显示半屏幕蓝色、半屏幕红色
- 人眼就会感觉到屏幕闪烁、撕裂
-
9.2 使用多Buffer来改进
上述两个缺点的根源是一致的:Framebuffer中的数据还没准备好整帧数据,就被LCD控制器使用了。 使用双buffer甚至多buffer可以解决这个问题:
- 假设有2个Framebuffer:FB0、FB1
- LCD控制器正在读取FB0
- APP写FB1
- 写好FB1后,让LCD控制器切换到FB1
- APP写FB0
- 写好FB0后,让LCD控制器切换到FB0
9.3 内核驱动程序、APP互相配合使用多buffer
流程如下:
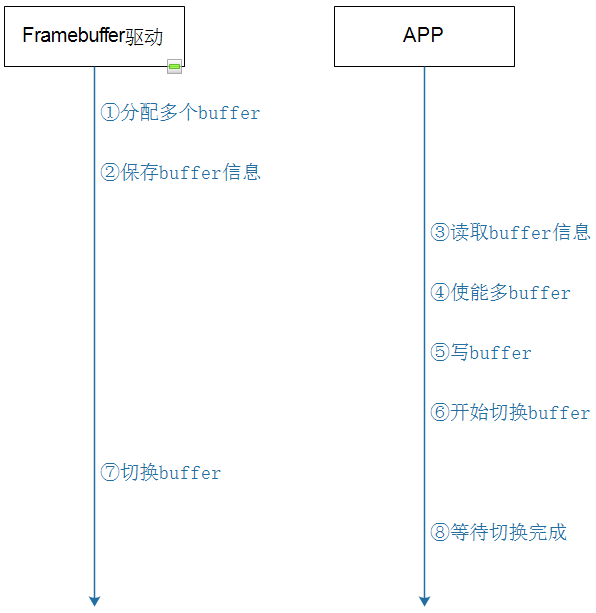
切换是由APP写完buffer之后,主动叫驱动程序去切换的,切换完成之后再把数据写入切换好的buffer中。
-
驱动:分配多个buffer
fb_info->fix.smem_len = SZ_32M; fbi->screen_base = dma_alloc_writecombine(fbi->device, fbi->fix.smem_len, // 分配的大小,fix.smem_len就是一个framebuffer的大小 (dma_addr_t *)&fbi->fix.smem_start, GFP_DMA | GFP_KERNEL); -
驱动:保存buffer信息
fb_info->fix.smem_len // 含有总buffer大小 fb_info->var // 含有单个buffer信息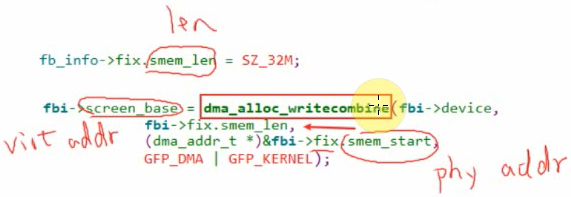
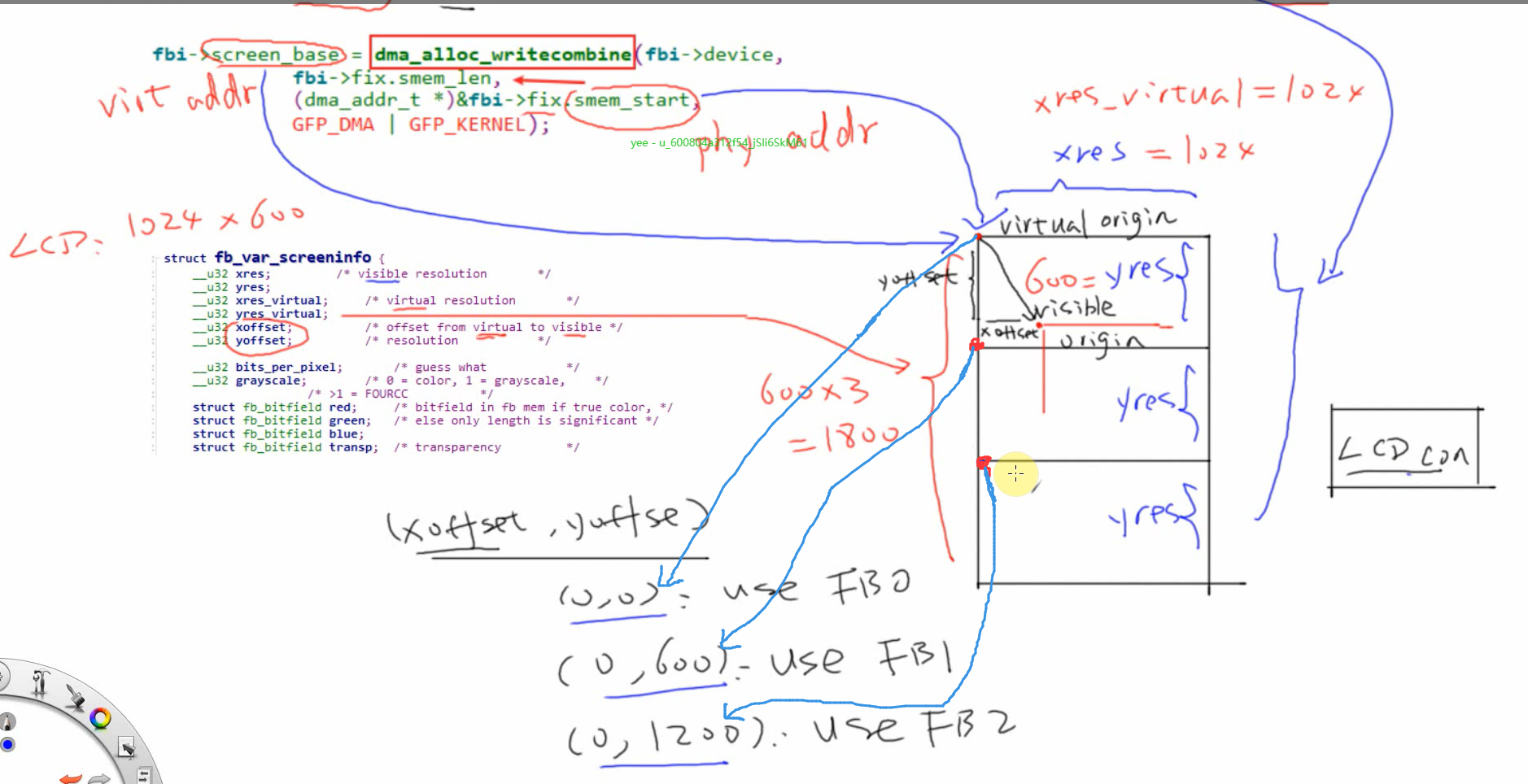
(1)一般x方向的分辨率 == x方向的虚拟分辨率
(2)y方向的虚拟分辨率就根据采用多少个buffer来计算==y方向的分辨率*buffer数量
(3)fb0->screen_base是framebuffer的虚拟基地址,&fbi->fix.smem_start中保存的是framebuffer的物理基地址
(4)xoffset、yoffset是LCD控制器去framebuffer的哪里读取数据,相对于左上角的基地址进行偏移作为目前的读取起始地址
(5)一般多buffer,都是xoffset基本不变,然后通过修改yoffset的值来实现不同buffer之间的切换
-
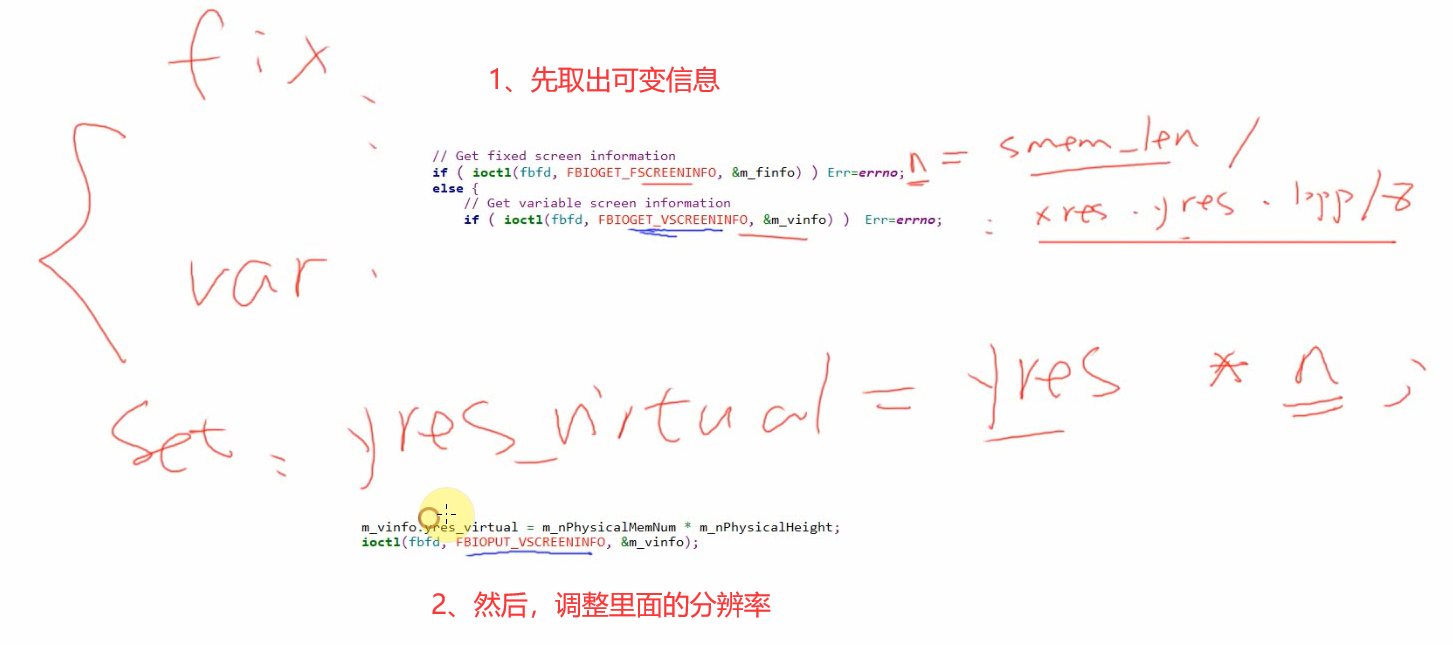
APP:读取buffer信息
ioctl(fd_fb, FBIOGET_FSCREENINFO, &fix); ioctl(fd_fb, FBIOGET_VSCREENINFO, &var); // 计算是否支持多buffer,有多少个buffer screen_size = var.xres * var.yres * var.bits_per_pixel / 8; nBuffers = fix.smem_len / screen_size; // 计算出驱动程序中给我们分配了多少个 buffer
一开始的时候,虚拟分辨率==真实分辨率,并且一开始不允许使用多Buffer,

想要使用 多buffer 的话,还需要做一些事情:set:yres_virtual = yres*n;

这个 n 怎么来的呢?
在固定信息里,我们知道:总的framebuffer的大小
在可变信息里,我们知道:xres,yres,bpp的大小
然后 n = smem_len / (xres * yres * bpp / 8)

APP怎么设置到驱动程序里面去呢?
应用程序切换buffer的过程如下
(1)先通过 ioctrl 获取到固定和可变的信息,然后计算好 yres_virtual 的值,然后再用 ioctrl把可变信息的值设置回去告诉驱动程序,然后驱动程序就可以处理多个 buffer了。
前面一开始的时候,驱动程序是不支持多buffer的,想要应用程序这样设置了才支持多个buffer。
(2)执行完前面之后,还需要进行 mmap来映射显存,这些都是在应用程序 APP 中进行的。
-
APP:使能多buffer
var.yres_virtual = nBuffers * var.yres; // 修改读取出来的可变信息的值 ioctl(fd_fb, FBIOPUT_VSCREENINFO, &var); // 写回去,使能驱动的多buffer -
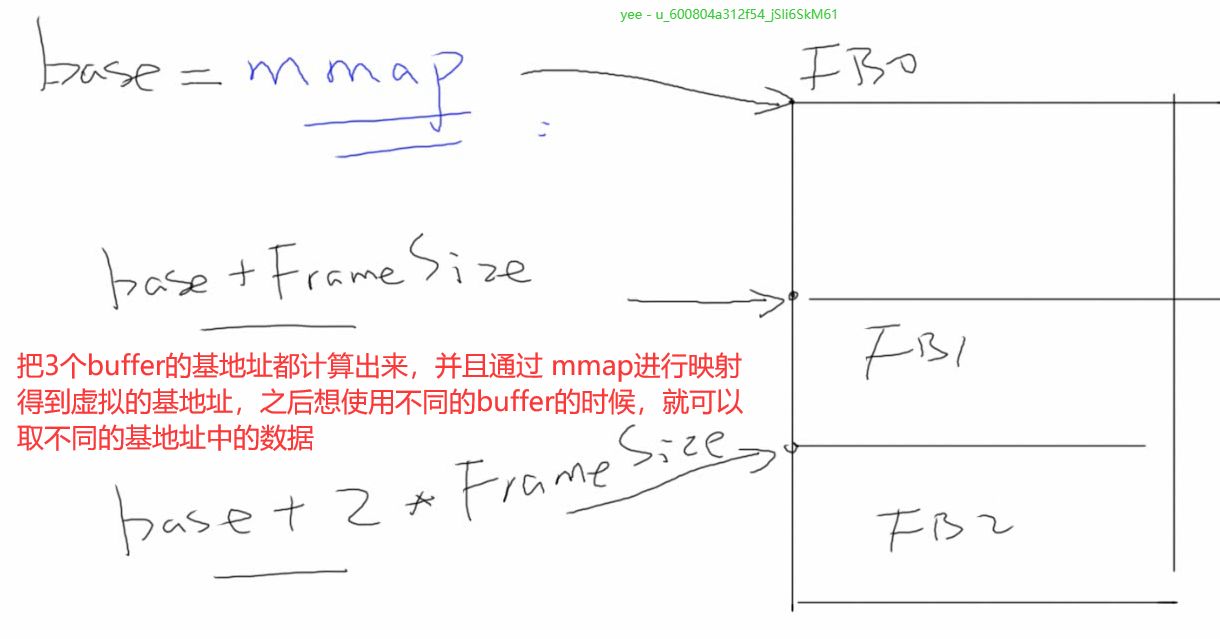
APP:写buffer
fb_base = (unsigned char *)mmap(NULL , fix.smem_len, PROT_READ | PROT_WRITE, MAP_SHARED, fd_fb, 0); // mmap多buffer的每一个基地址 /* get buffer */ pNextBuffer = fb_base + nNextBuffer * screen_size;//修改提取哪一个framebuffer /* set buffer */ lcd_draw_screen(pNextBuffer, colors[i]);//传入mmap之后的framebuffer的基地址,从这里获取数据 -
APP:开始切换buffer
/* switch buffer */ var.yoffset = nNextBuffer * var.yres; // 修改 yoffet 可变信息的值 ioctl(fd_fb, FBIOPAN_DISPLAY, &var); // 然后通过 ioctl 来启动
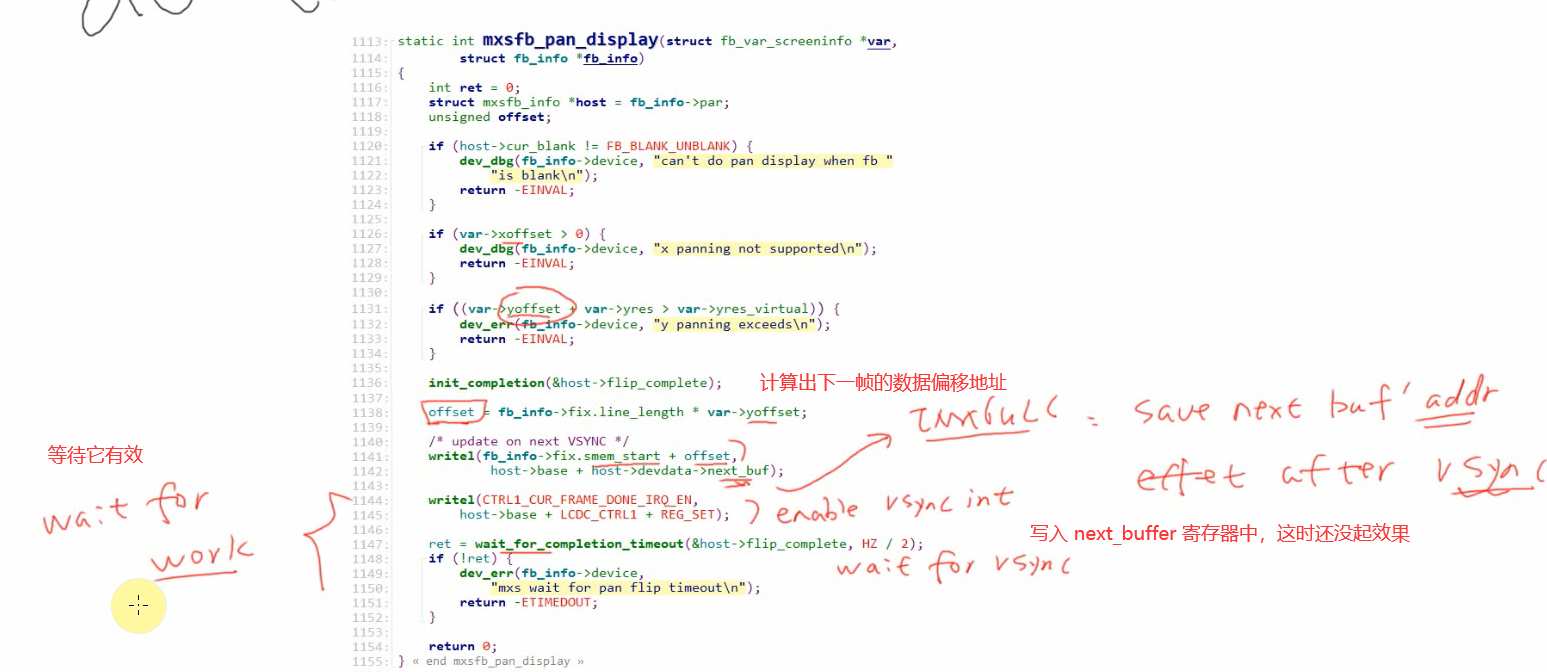
这个next_buf寄存器什么时候有效的呢,从 vsync信号来了之后,表示一帧数据完成了,
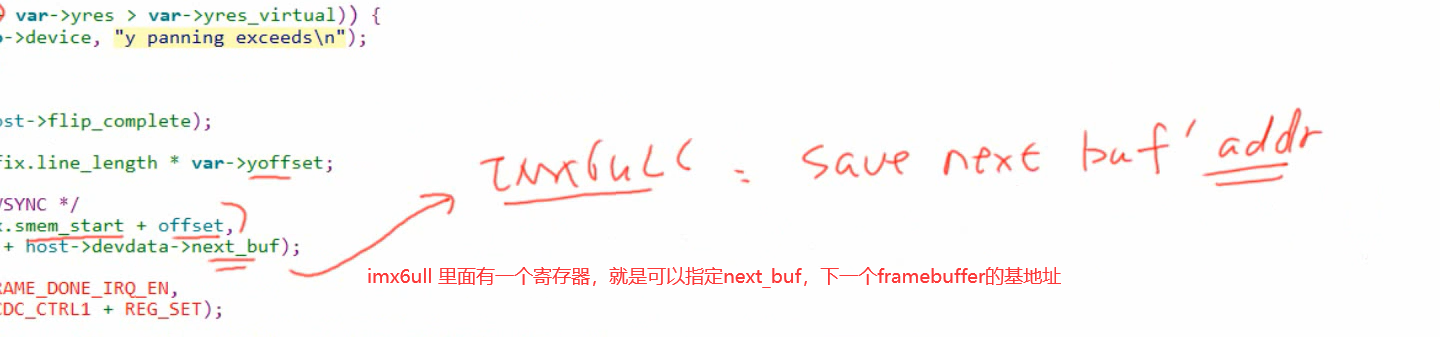
在驱动程序里面,既设置了这个地址,还等待了这个地址有效
-
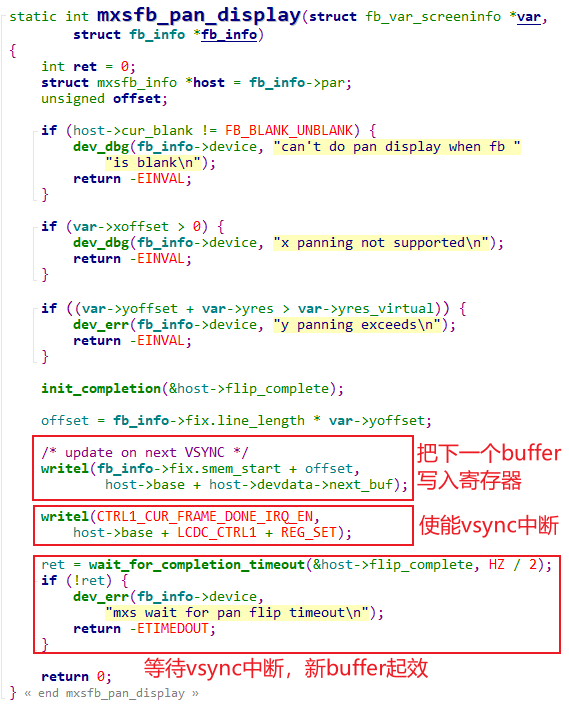
驱动:切换buffer
// fbmem.c fb_ioctl do_fb_ioctl fb_pan_display(info, &var); err = info->fbops->fb_pan_display(var, info) // 调用硬件相关的函数示例:
-
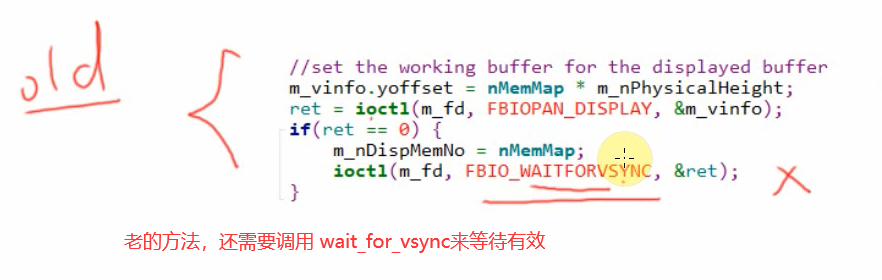
APP:等待切换完成(在驱动程序中已经等待切换完成了,所以这个调用并无必要)
ret = 0; ioctl(fd_fb, FBIO_WAITFORVSYNC, &ret);
9.4 使用多buffer的应用和驱动流程
(1)驱动程序可以分配1个或者多个buffer,只是分配了这么多个内存空间而已,还没有buffer的概念,这里是显存的概念
(2)驱动需要描述总buffer和单个buffer的信息,都保存在下面
总 buffer:固定信息
单 buffer:可变信息
(3)应用程序去获取信息,知道驱动分配了多大的显存,然后计算出这个驱动程序支持的最多的buffer是多少
(4)然后应用程序想用多少个buffer,就计算出y的虚拟分辨率,设置到驱动程序中,让驱动程序支持多个 buffer
(5)然后mmap映射显存,然后在显存里构造数据
(6)构造好数据之后,然后应用程序想把framebuffer1中的数据用起来,让lcd控制器从framebuffer1中读取数据来显示,则需要使用 ioctrl。
(7)ioctrl会导致驱动程序中的某一个 ioctrl函数被调用,这个函数里面和硬件密切相关
它需要把哪个新的地址给用起来,它会根据传来的yoffset信息计算出新的地址,然后设置到LCD的某个寄存器next_buffer中,并且等待这个地址起效。
9.5 上机测试
(1)禁止开发板自带的GUI程序
在开发板上执行以下命令:
[root@100ask:~]# mv /etc/init.d/S99myirhmi2 /etc/
[root@100ask:~]# reboot // 重启,之后要换回来再拷贝回去
[root@100ask:~]# mv /etc/S99myirhmi2 /etc/init.d/
(2)LCD自动黑屏
为了省电,LCD在10分钟左右会自动黑屏。 如果你正在运行multi_framebuffer_test程序,可能会有如下提示(以IMX6ULL为例):
[ 961.147548] mxsfb 21c8000.lcdif: can't wait for VSYNC when fb is blank
这表示:当屏幕为blank(黑屏)时,无法等待VSYNC。
我们可以禁止LCD自动黑屏,执行以下命令即可:
#close lcd sleep
echo -e "\033[9;0]" > /dev/tty1
echo -e "\033[?25l" > /dev/tty1
(3)驱动程序可以支持 13个buffer
10 疑问
(1)(解决)
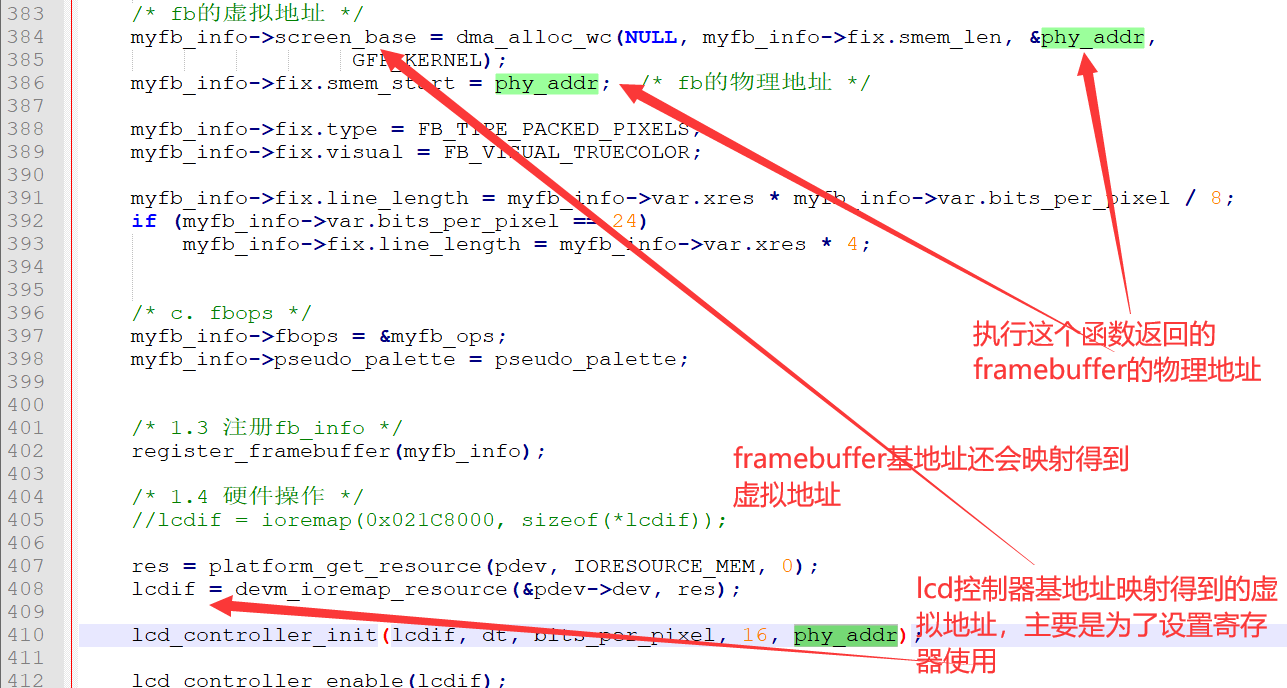
myfb_info->screen_base = dma_alloc_wc(NULL, myfb_info->fix.smem_len, &phy_addr, GFP_KERNEL);
这个 &phy_addr 是干嘛的,就是系统内核给我们自动分配的 frame buffer 的物理基地址,
并且返回映射之后的虚拟基地址。
(2)(解决)
myfb_info->fix.line_length
什么时候添加这个 属性的
quem的时候就提供了,之前是为了排查是什么错误的时候添加的,还有下面这个属性
myfb_info->pseudo_palette = pseudo_palette;
(3)
忘记为什么要设置 fb_info结构体的值了
- 套了个框架,帮我们创建了设备节点,帮我们创建了字符设备驱动
(4)还需要重新开前面部分的视频,了解系统内核的 LCD 驱动程序做了什么工作
(5)还需要学习单片机的LCD程序,8080接口,看看和TFT-RGB有什么区别,设置的时序参数有什么不同
11 编译过程
预处理
gcc -o hello.i hello.c -E
汇编
gcc -o hello.s -S hello.i
.o是对象文件
gcc -o hello.o hello.s -c
(前面三步分别执行的结果和下面一步执行的结果是一样的)
.o是对象文件
gcc -o hello1.o hello.c -c
得到可执行文件
gcc -o hello hello.o