StudyNotes
1 Pinctrl子系统视频介绍
参考资料:
- Linux 5.x内核文档
- Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
- Linux 4.x内核文档
- Documentation\pinctrl.txt
- Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
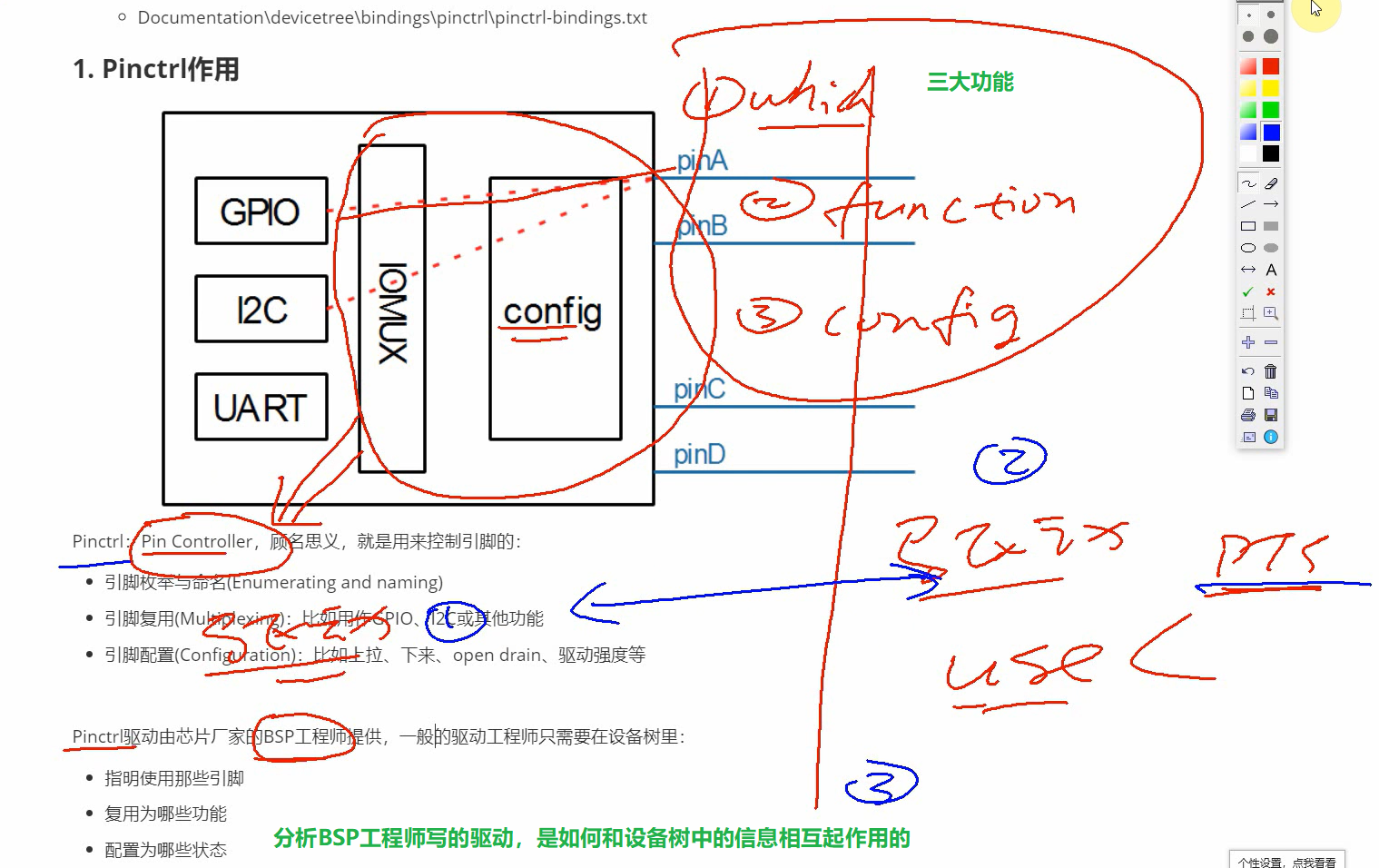
1.1 Pinctrl作用
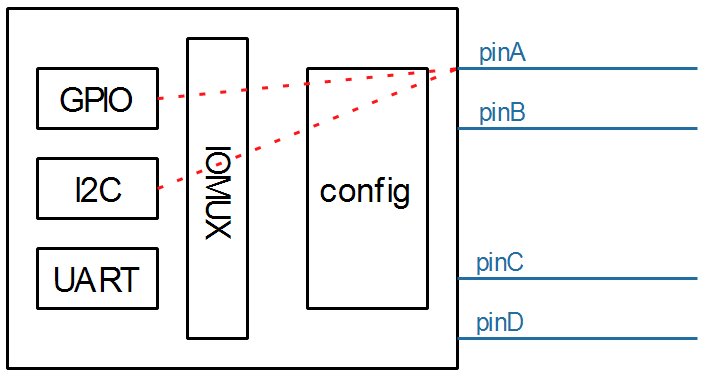
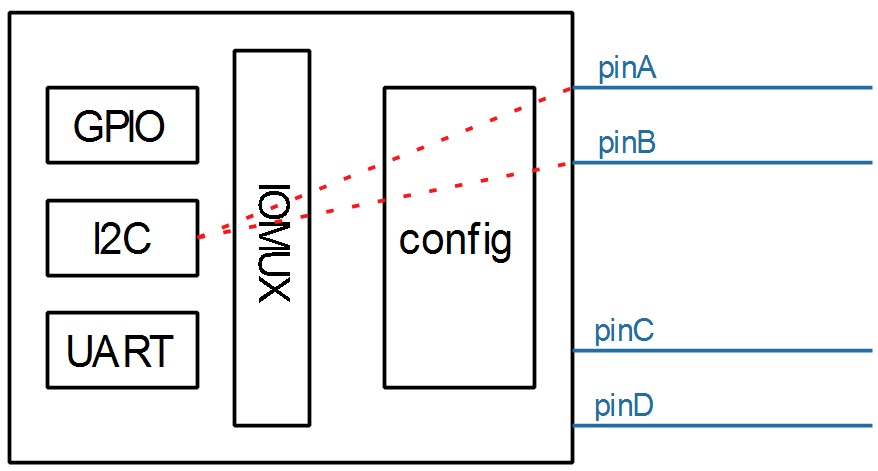
芯片内部有很多控制器 gpio i2c uart 然后他们都需要有引脚才能与外部交流,而芯片也有很多引脚 pin,然后这些 pin 是独立的,这些 pin连接到哪一个控制器(外设)上,就需要中间有一个 pin controller 子系统来管理,而这个 pin controller 子系统 这是软件上抽象的一个概念,其主要功能在下面介绍。
Pinctrl:Pin Controller,顾名思义,就是用来控制引脚的:
- 引脚枚举与命名(Enumerating and naming)
- 引脚复用(Multiplexing):比如用作GPIO、I2C或其他功能
- 引脚配置(Configuration):比如上拉、下来、open drain、驱动强度等
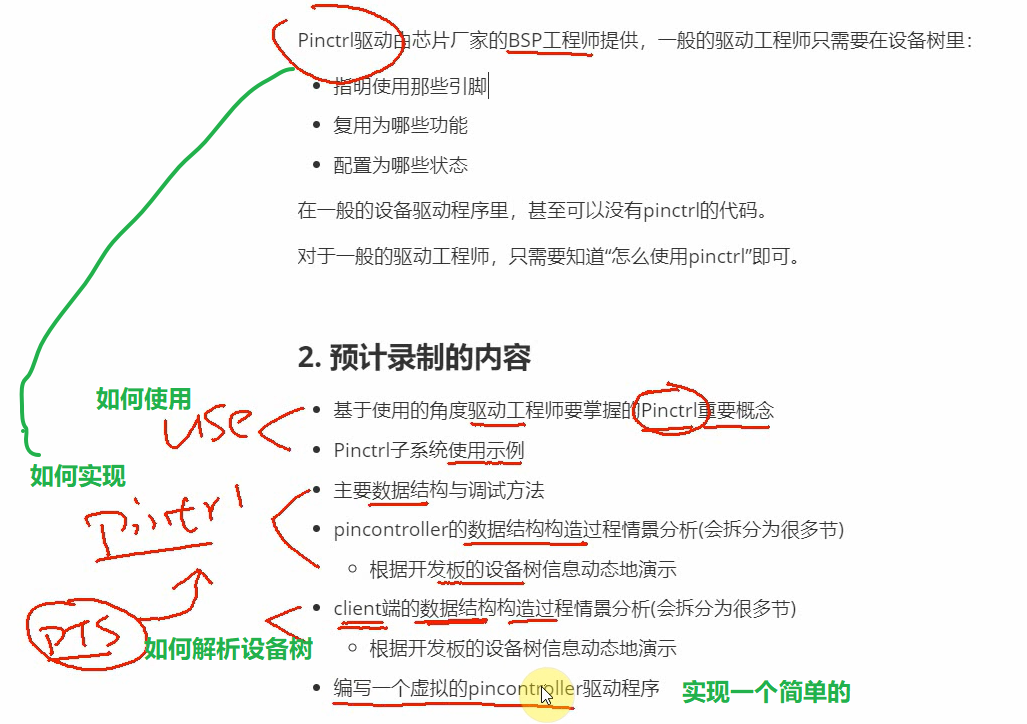
Pinctrl驱动由芯片厂家的BSP工程师提供,一般的驱动工程师只需要在设备树里:
- 指明使用那些引脚
- 复用为哪些功能
- 配置为哪些状态
在一般的设备驱动程序里,甚至可以没有pinctrl的代码。
对于一般的驱动工程师,只需要知道“怎么使用pinctrl”即可。
1.2 预计录制的内容
-
基于使用的角度驱动工程师要掌握的Pinctrl重要概念
-
Pinctrl子系统使用示例
-
主要数据结构与调试方法
-
pincontroller的数据结构构造过程情景分析(会拆分为很多节)
- 根据开发板的设备树信息动态地演示
-
client端的数据结构构造过程情景分析(会拆分为很多节)
- 根据开发板的设备树信息动态地演示
-
编写一个虚拟的pincontroller驱动程序
1.3 代码中怎么引用pinctrl
这是透明的,我们的驱动基本不用管。当设备切换状态时,对应的pinctrl就会被调用。
比如在platform_device和platform_driver的枚举过程中,流程如下:

当系统休眠时,也会去设置该设备sleep状态对应的引脚,不需要我们自己去调用代码。
非要自己调用,也有函数:
devm_pinctrl_get_select_default(struct device *dev); // 使用"default"状态的引脚
pinctrl_get_select(struct device *dev, const char *name); // 根据name选择某种状态的引脚
pinctrl_put(struct pinctrl *p); // 不再使用, 退出时调用
2 Pinctrl子系统使用示例_基于IMX6ULL
参考资料:
- Linux 5.x内核文档
- Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
- Linux 4.x内核文档
- Documentation\pinctrl.txt
- Documentation\devicetree\bindings\pinctrl\pinctrl-bindings.txt
2.1 要做什么
以I2C为例:
- 查看原理图确定使用哪些引脚:比如pinA、pinB
- 生成pincontroller设备树信息
- 选择功能:比如把pinA配置为I2C_SCL、把pinB配置为I2C_SDA
- 配置:比如把pinA、pinB配置为open drain
- 使用pincontroller设备树信息:比如在i2c节点里定义”pinctrl-names”、”pinctrl-0”
2.2 生成pincontroller设备树信息
生成pincontroller设备树信息,有3中方法:
- 有些芯片有图形化的工具,可以点点鼠标就可以配置引脚信息,得到pincontroller中的信息
- 有些芯片,只能看厂家给的设备树文档或者参考设备树的例子
- 最差的就是需要阅读驱动代码才能构造设备树信息。
2.2.1 安装工具
对于IMX6ULL,有引脚配置工具/设备树生成工具:
- 打开:http://download.100ask.net/
- 找到开发板:”100ASK_IMX6ULL_PRO开发板”
- 下载开发板配套资料
- 下载完后,工具在如下目录里:

2.2.2 根据原理图生成pinctrl信息
&iomuxc {
pinctrl-names = "default";
pinctrl-0 = <&BOARD_InitPins>;
imx6ull-board {
i2c1_pins: i2c1_pins { /*!< Function assigned for the core: Cortex-A7[ca7] */
fsl,pins = <
MX6UL_PAD_UART4_RX_DATA__I2C1_SDA 0x000018B0
MX6UL_PAD_UART4_TX_DATA__I2C1_SCL 0x000018B0
>;
};
};
};
2.3 在client节点使用pinctrl
&i2c1 {
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&i2c1_pins>;
status = "okay";
};
2.4 使用过程
这是透明的,我们的驱动基本不用管。当设备切换状态时,对应的pinctrl就会被调用。
比如在platform_device和platform_driver的枚举过程中,流程如下:
